Künstliche Intelligenz
Roborock Saros Z70 im Test: Saugroboter mit Greifarm erklimmt Teppiche am besten
Der Roborock Saros Z70 ist der erste Saugroboter mit integriertem Greifarm. Ob diese Besonderheit den hohen Preis von 1629 Euro rechtfertigt, zeigt unser Test.
Der Roborock Saros Z70 will die Saugroboter-Welt revolutionieren. Als Erster seiner Art besitzt er einen ausfahrbaren Greifarm, der herumliegende Gegenstände aufräumen soll. Mit einem Preis von 1629 Euro spielt das Gerät in der absoluten Oberklasse mit.
Dafür bietet der Hersteller aber auch beeindruckende Technik: 22.000 Pa Saugleistung, drei Kameras zur Objekterkennung und eine umfangreiche Reinigungsstation mit Heißwasser-Moppwäsche. Der Omni-Grip-Arm kann Objekte bis 300 Gramm greifen und wegräumen. Dabei lernt der Roboter bis zu 50 neue Objekte, zusätzlich zu den 108 vorprogrammierten.
Die Frage ist: Rechtfertigt diese Innovation den Premium-Preis, oder handelt es sich nur um eine nette Spielerei? Die Antwort liefert dieser Testbericht.
Design: Wie gut ist die Verarbeitung des Roborock Saros Z70?
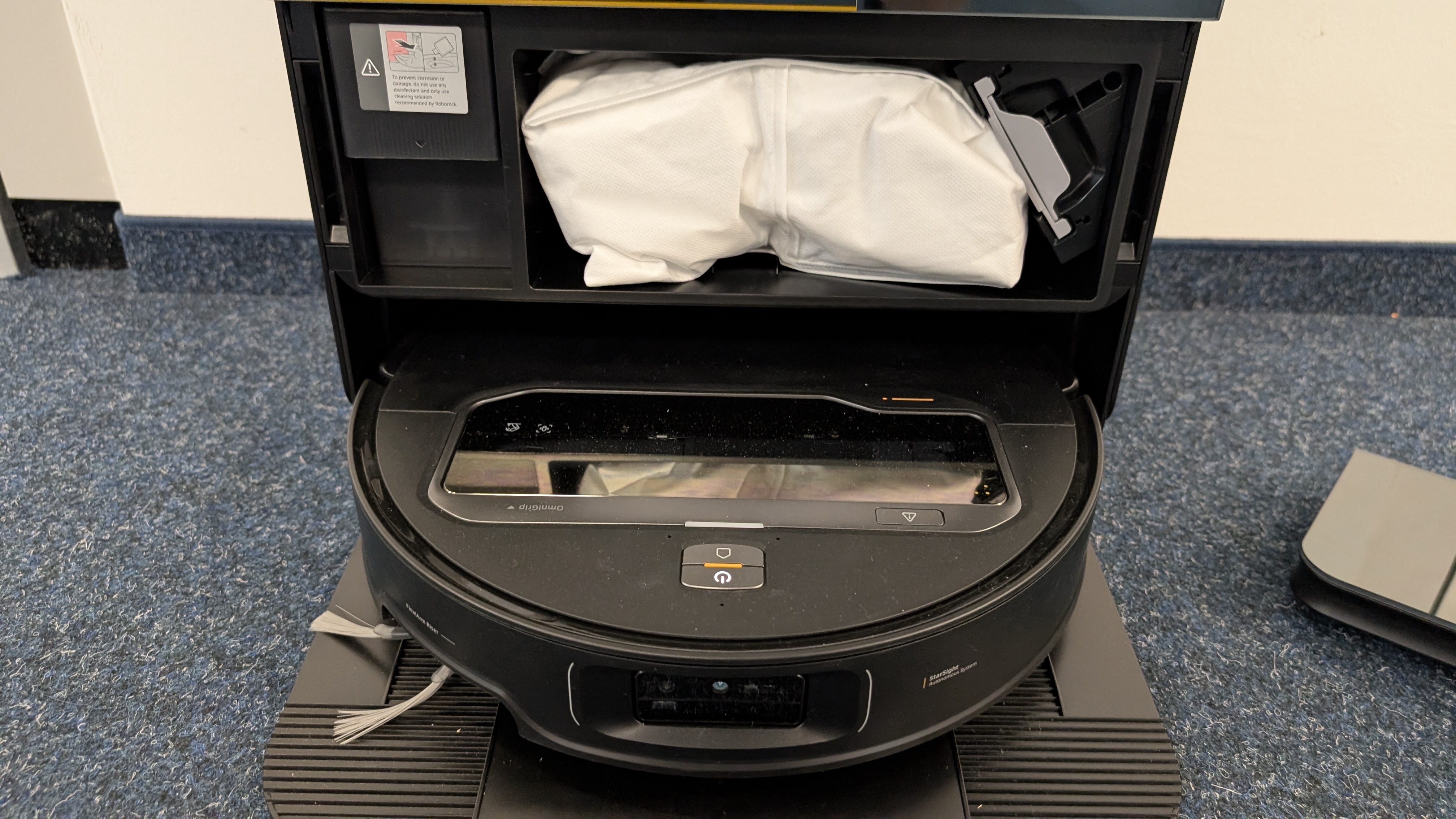
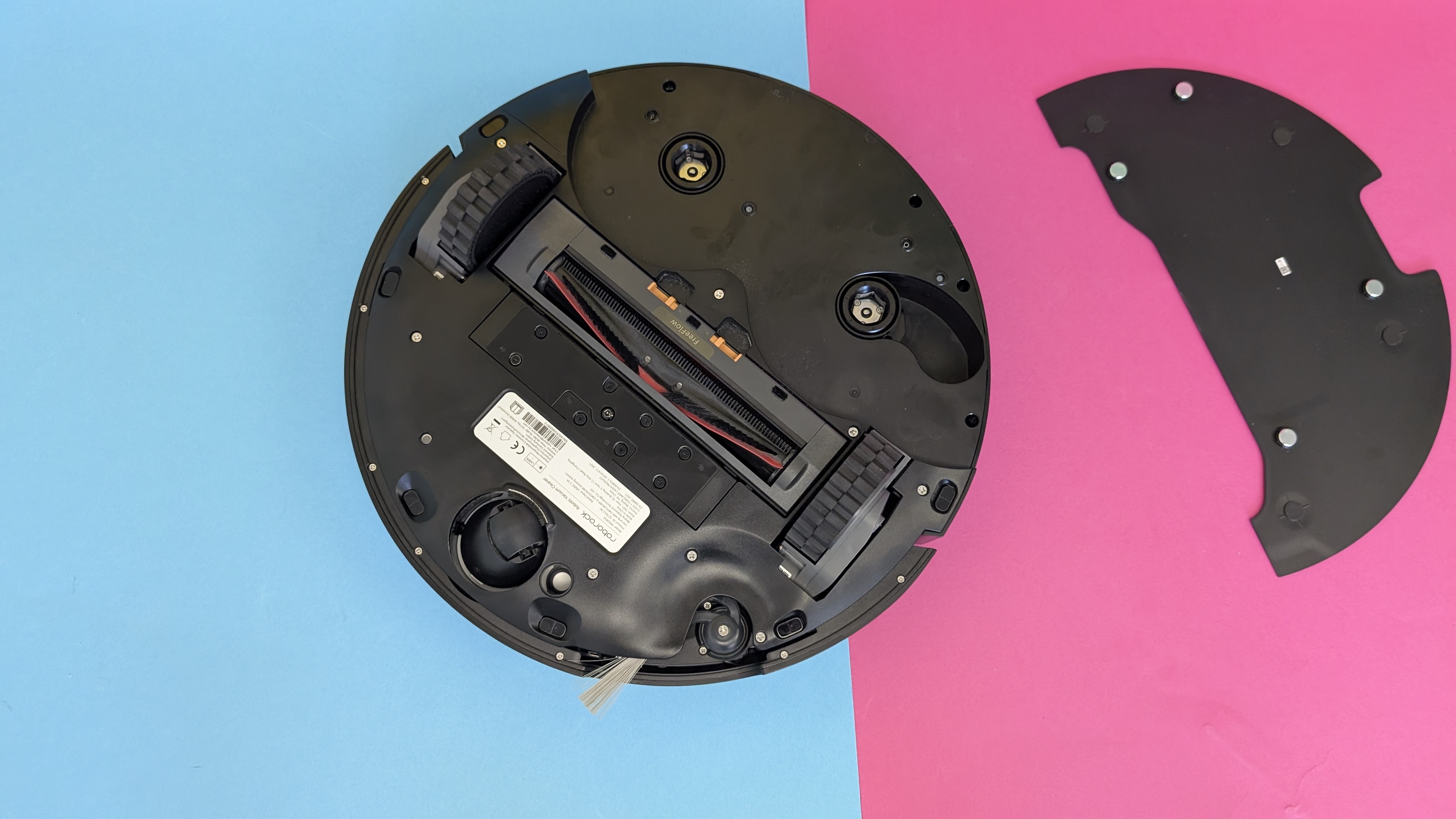
Der Saros Z70 beeindruckt mit kompakter Bauweise trotz integriertem Greifarm. Mit nur 7,98 cm Höhe bleibt er erstaunlich flach. Das hohe Gewicht vermittelt einen hochwertigen Eindruck. Die schwarz-silberne Farbgebung wirkt futuristisch, die Klarglas-Vorderseite zieht allerdings Fingerabdrücke magisch an. Roborock hat das Innenleben komplett neu entwickelt und die Komponenten extrem platzsparend angeordnet. Der faltbare Arm verschwindet nahezu unsichtbar im Gehäuse unter einem aufklappbaren Deckel. Die Verarbeitung ist tadellos, alle Teile sitzen fest und nichts klappert.
Roborock Saros Z70 – Bilderstrecke
Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke
Roborock Saros Z70 – Bilderstrecke
Roborock Saros Z70 – Bilderstrecke
Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke
Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke
Roborock Saros Z70 – Bilderstrecke
Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke
Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke

Roborock Saros Z70 – Bilderstrecke
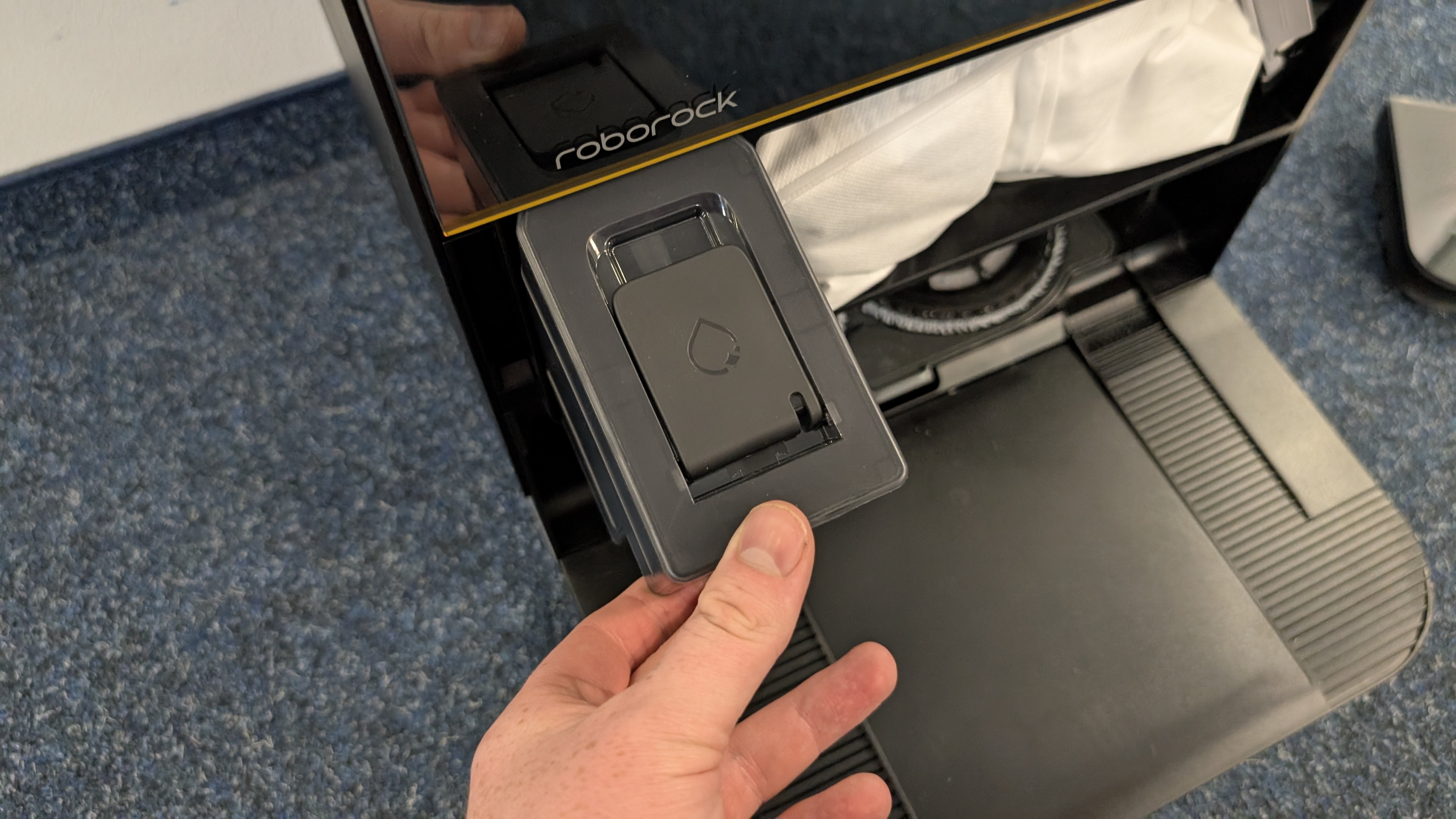
Die Station wirkt mit ihren Abmessungen von 381 × 488 × 475 mm wuchtig, bietet dafür aber auch umfangreiche Funktionen. Sie beherbergt einen Behälter für 4 Liter Frischwasser und einen für 3 Liter Schmutzwasser. Ein zusätzlicher Behälter für Reinigungsflüssigkeit ist neben dem 2,5-Liter-Schmutzbehälter hinter einer magnetischen Klappe integriert.
Einrichtung: Wie schnell ist der Roborock Saros Z70 betriebsbereit?
Die Einrichtung gelingt dank bebilderter Anleitung problemlos und beginnt mit dem Auspacken und Aufstellen der Station. Diese sollte auf ebenem Untergrund mit mindestens 50 cm Freiraum vorn und 30 cm seitlich stehen. Nach dem Anschluss ans Stromnetz folgt das Befüllen des Frischwassertanks und das Einsetzen des Staubbeutels. Der Roboter wird auf die Ladestation gesetzt und lädt erstmals auf.
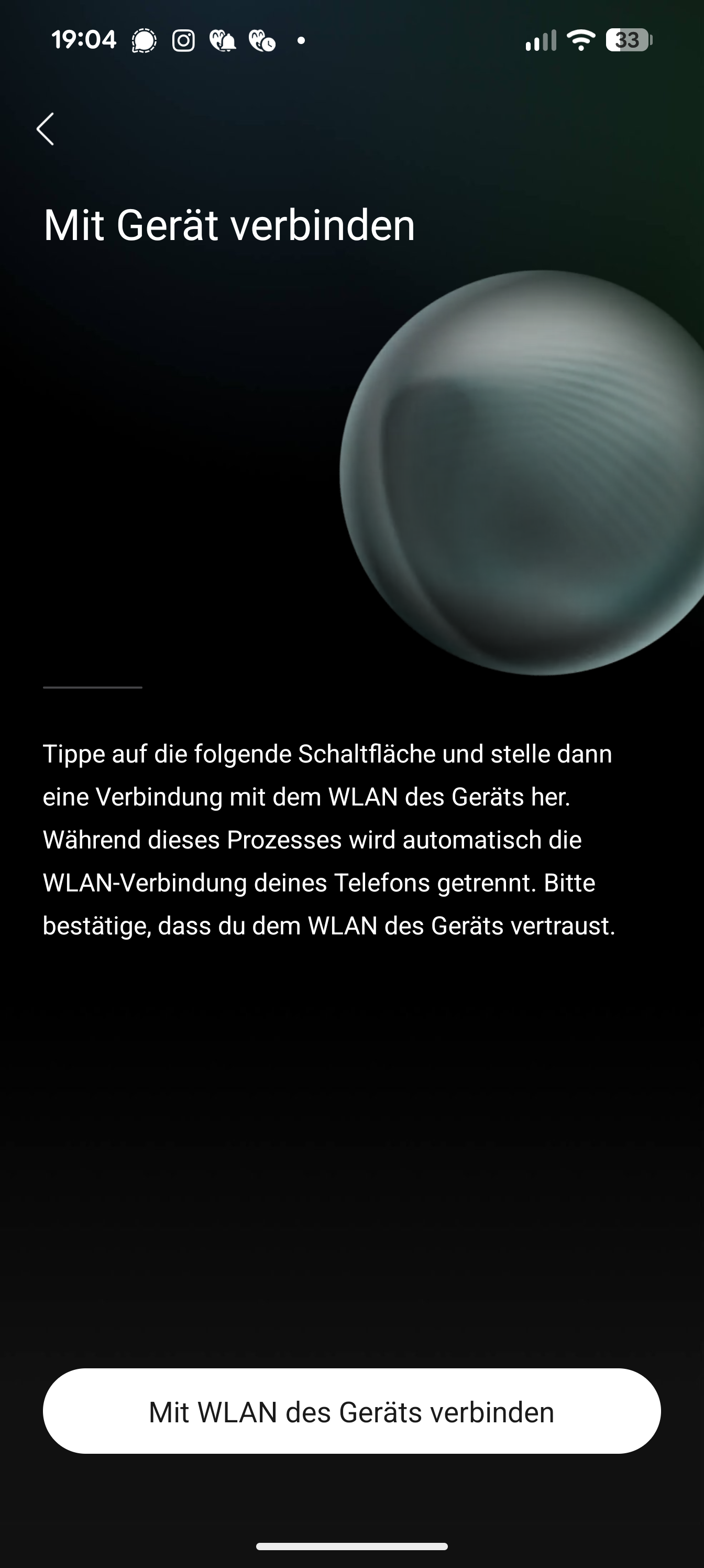
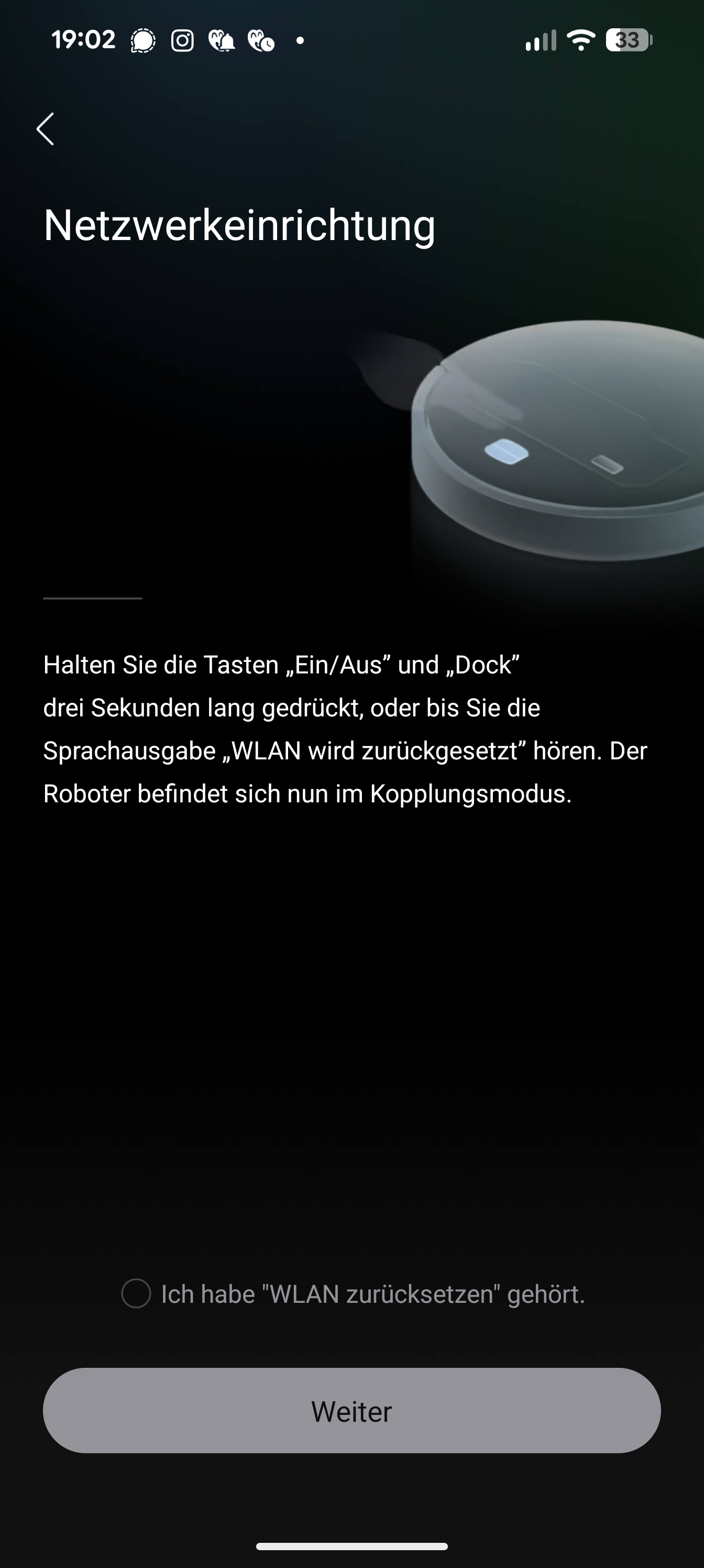
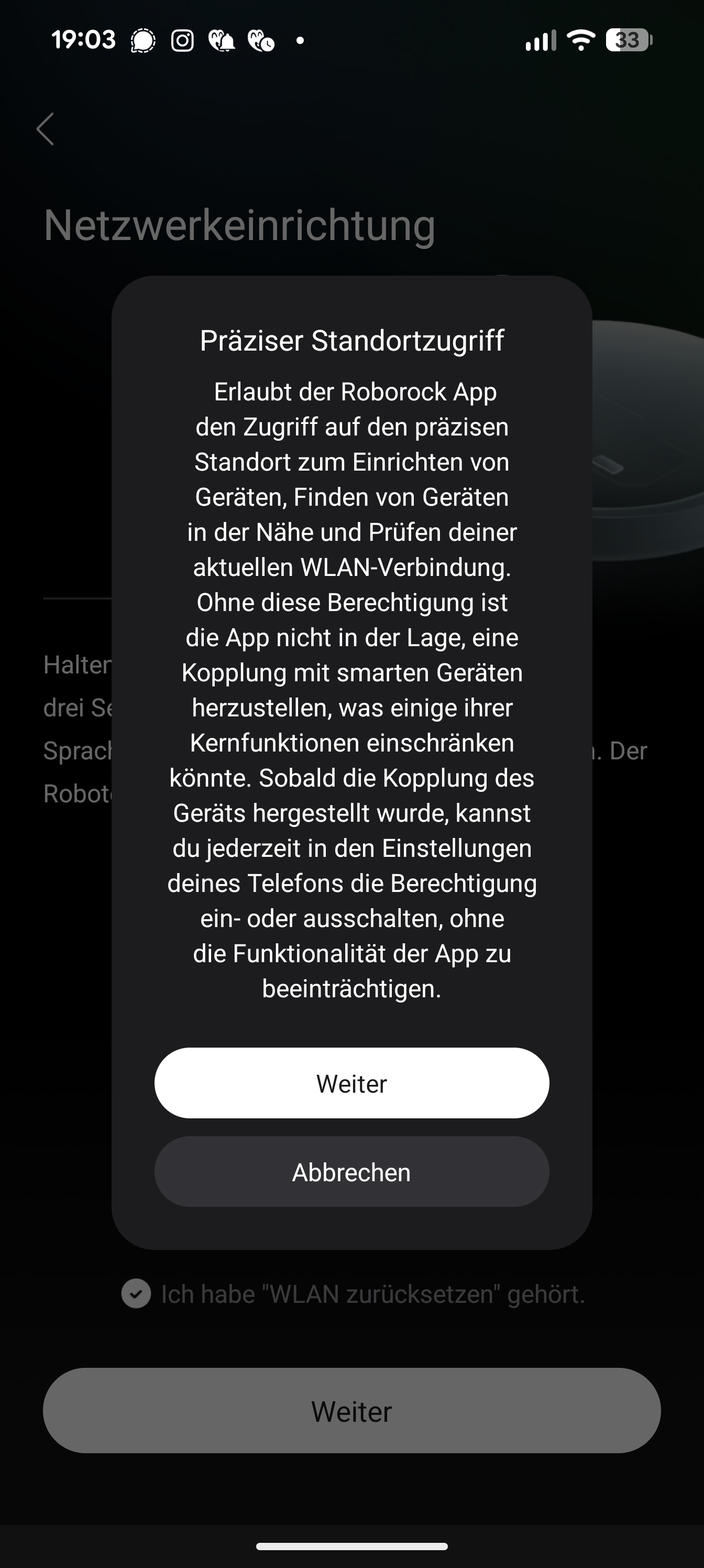
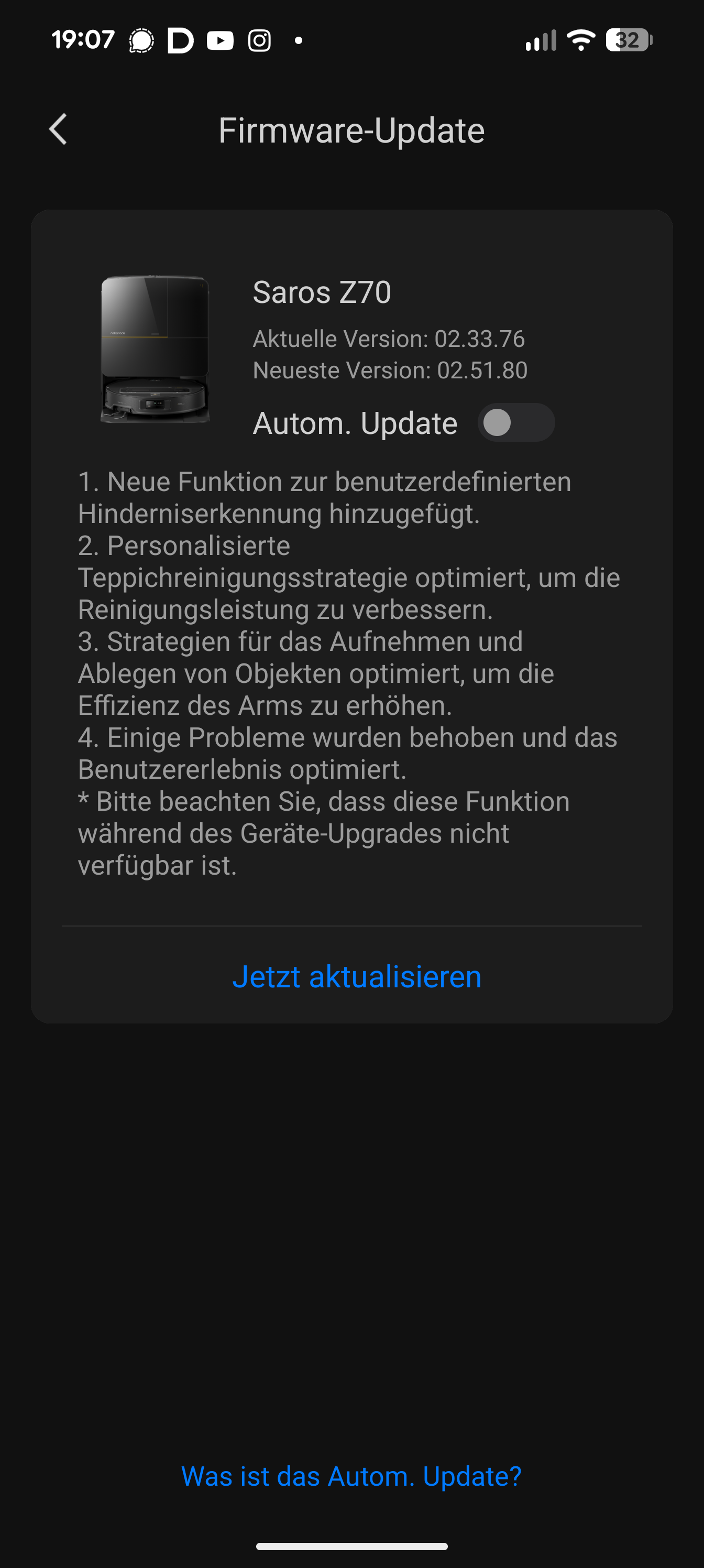
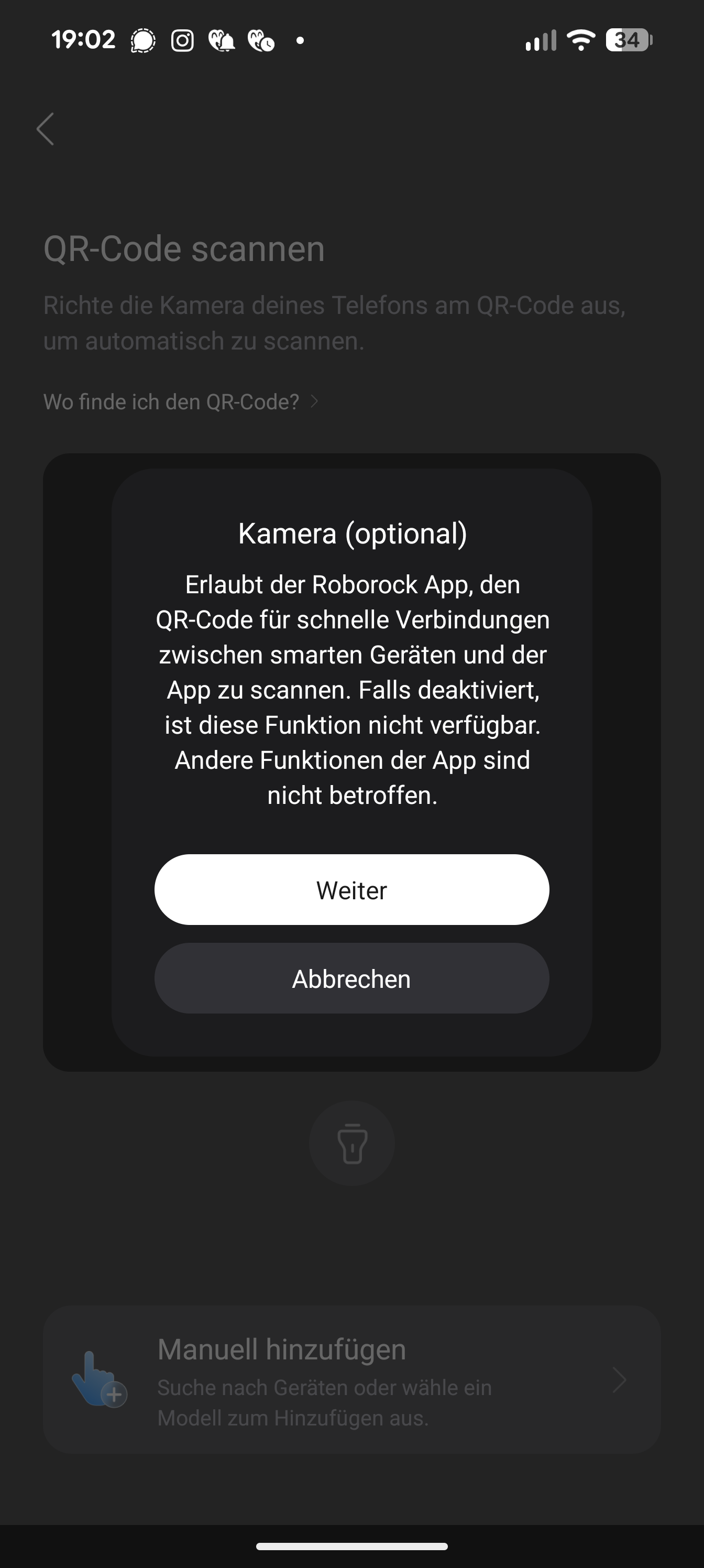
Parallel lädt man die Roborock-App herunter und erstellt ein Konto. Nach dem Start der App tippt man auf das Plus-Symbol und wählt „Saros Z70“ aus der Geräteliste. Die App zeigt nun eine Schritt-für-Schritt-Anleitung. Zunächst muss der Roboter eingeschaltet und die WLAN-Taste 3 Sekunden gedrückt werden, bis ein Signalton ertönt.
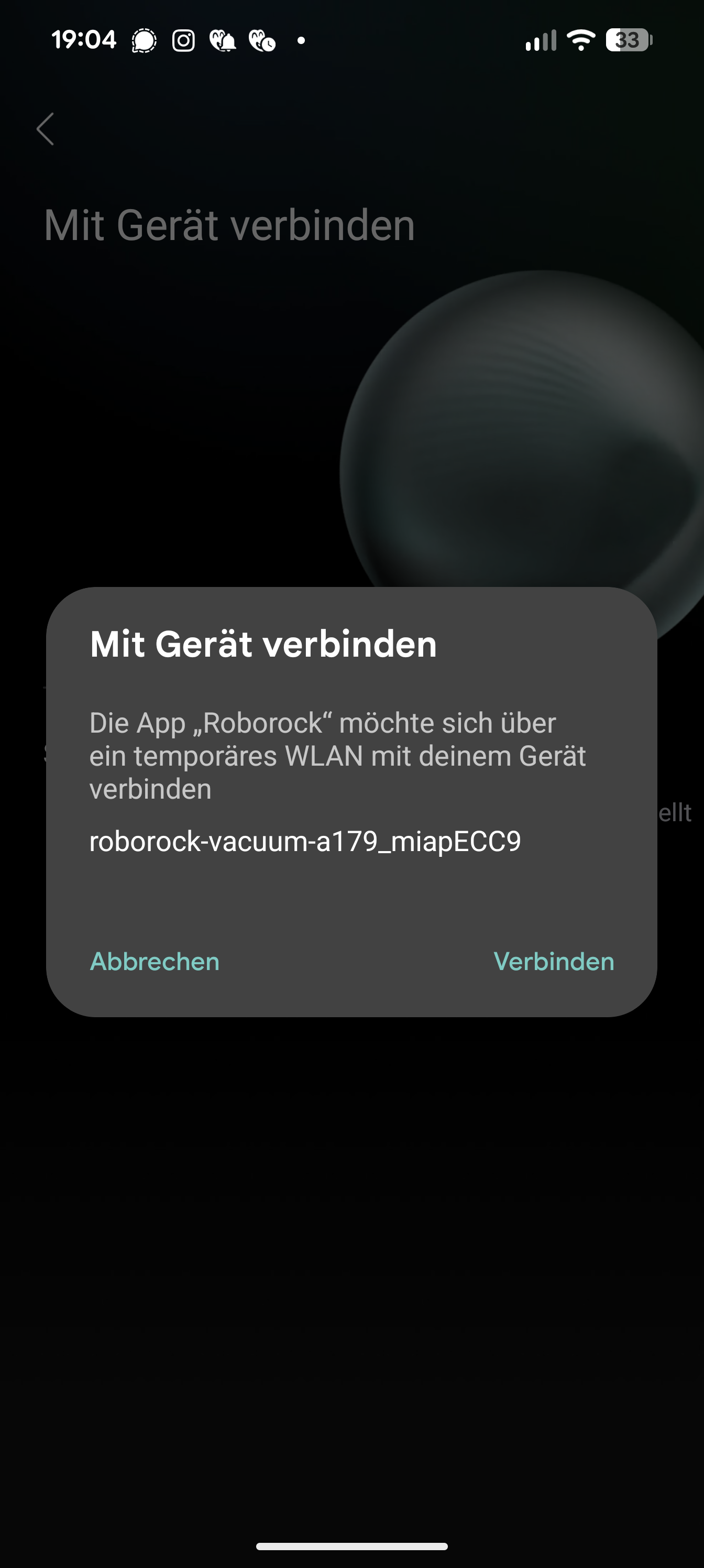
Die WLAN-Verbindung erfolgt nur über 2,4 GHz – bei Dual-Band-Routern muss man aufpassen. Die App sucht automatisch nach dem Roboter-Hotspot. Nach der Verbindung gibt man seine WLAN-Zugangsdaten ein. Der Roboter verbindet sich mit dem Heimnetzwerk, was einige Sekunden dauert.
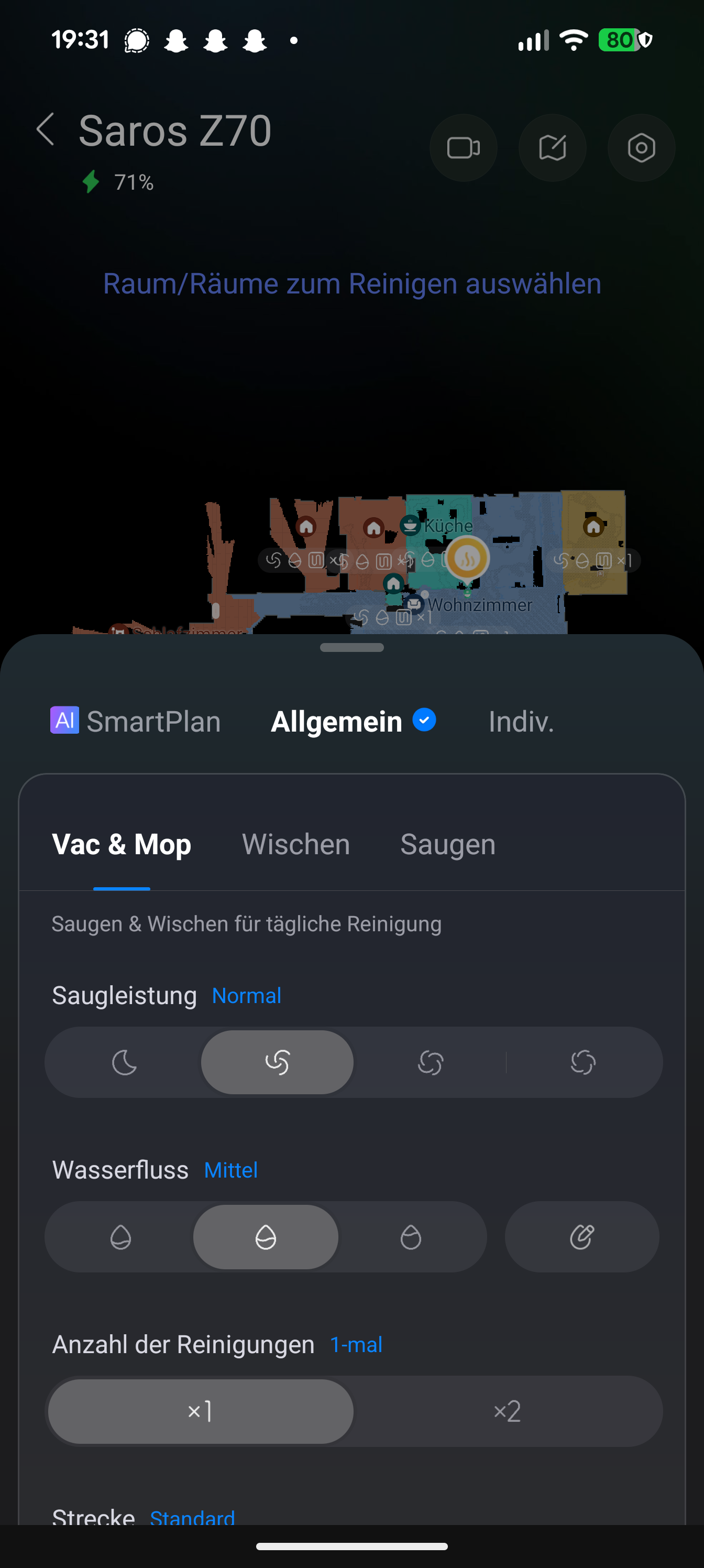
Die Roborock-App führt Schritt für Schritt durch den Prozess. Die App gilt als eine der besten am Markt, wirkt anfangs aber komplex. Viele Untermenüs und teilweise kryptische Optionen können zunächst überfordern. Nach Einarbeitung entpuppt sie sich als mächtiges Werkzeug.
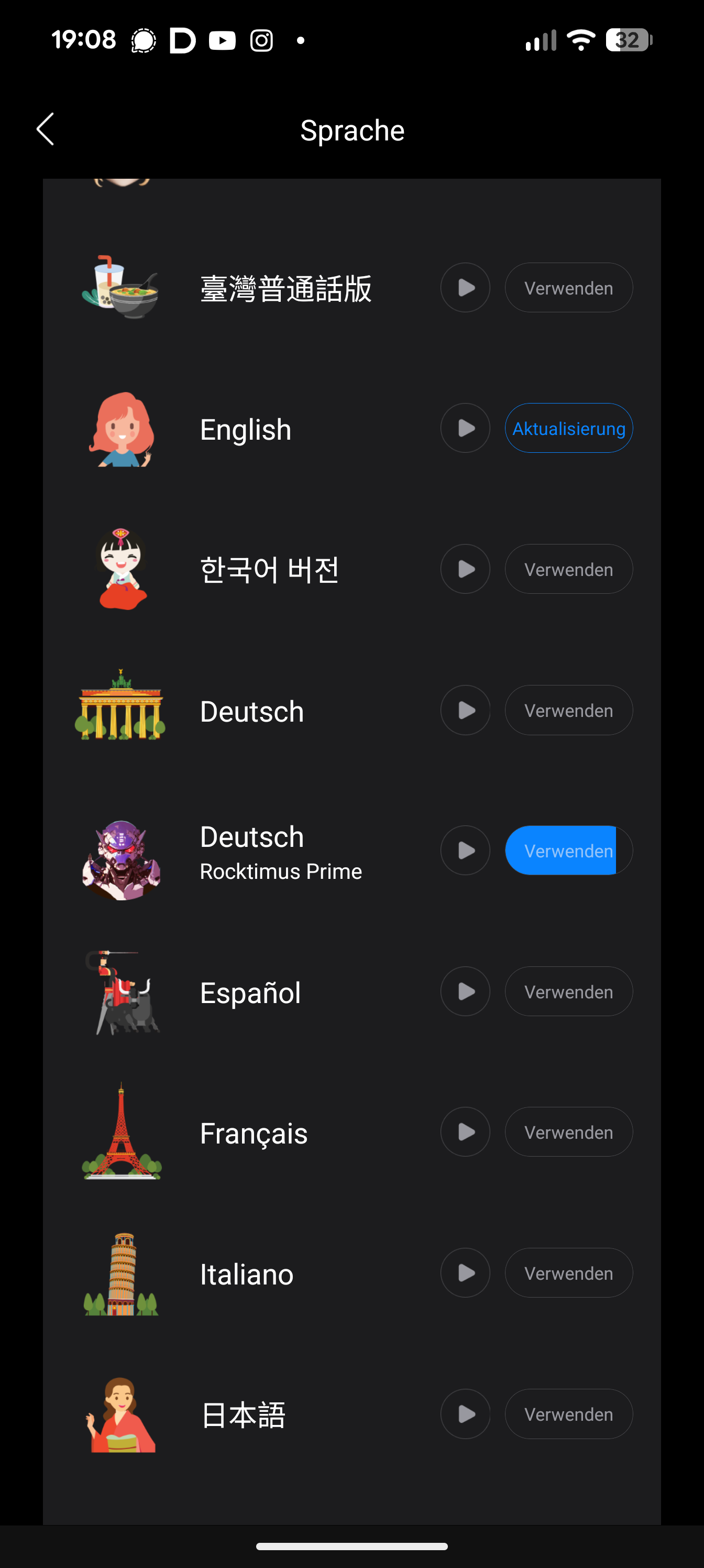
Besonders unterhaltsam: Die Stimmauswahl bietet neben klassischen Ansagen auch „Rocktimus Prime“ – eine Transformers-Parodie. Der Roboter spricht dann von „Waffensystemen reinigen“ und begibt sich auf „Missionen“. Das Motto „Kein Staub bleibt!“ sorgt für Abwechslung. Nach getaner Arbeit heißt es „wir treffen uns an der Basis, wo die Einsatzspuren“ beseitigt werden.
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung

Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung

Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung

Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung

Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung

Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung

Roborock Saros Z70 – App & Einrichtung
Roborock Saros Z70 – App & Einrichtung
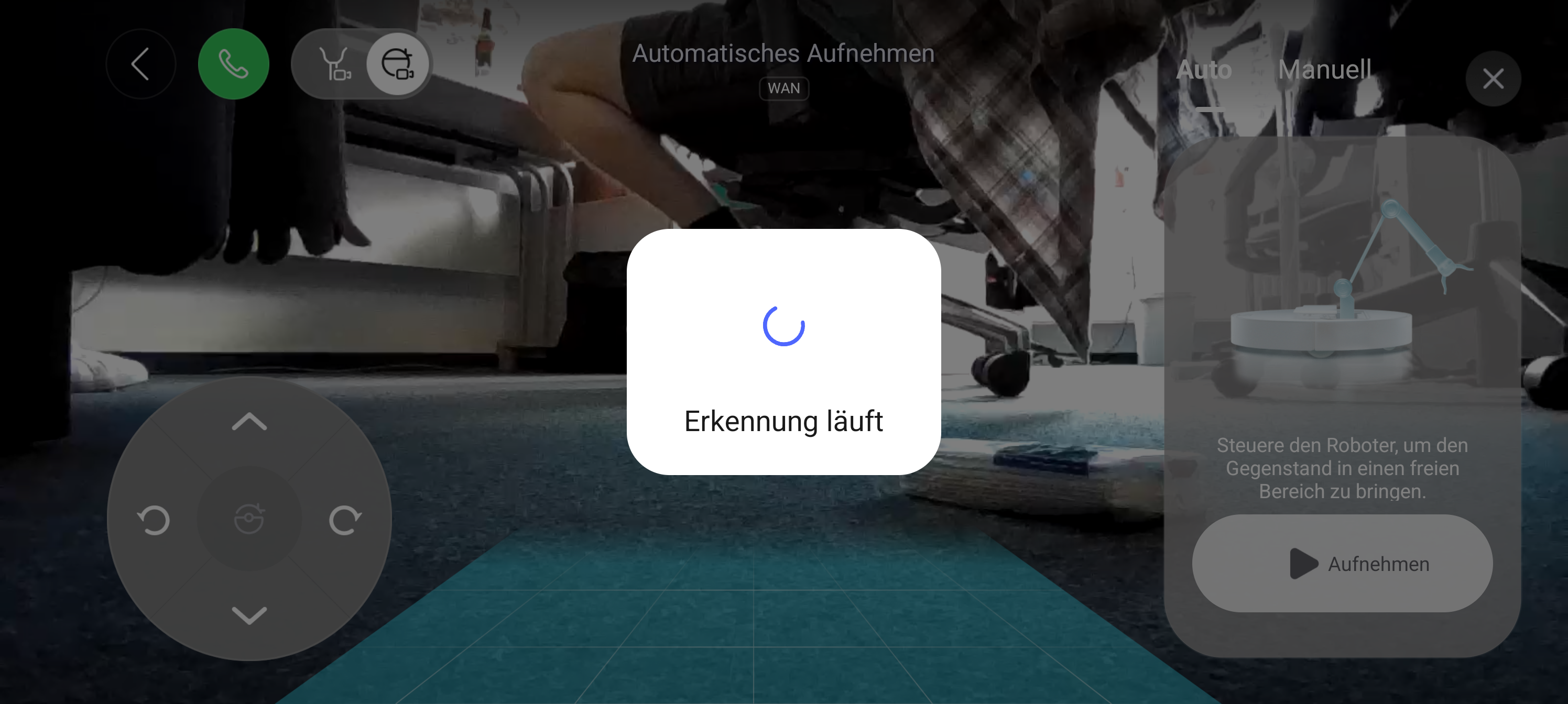
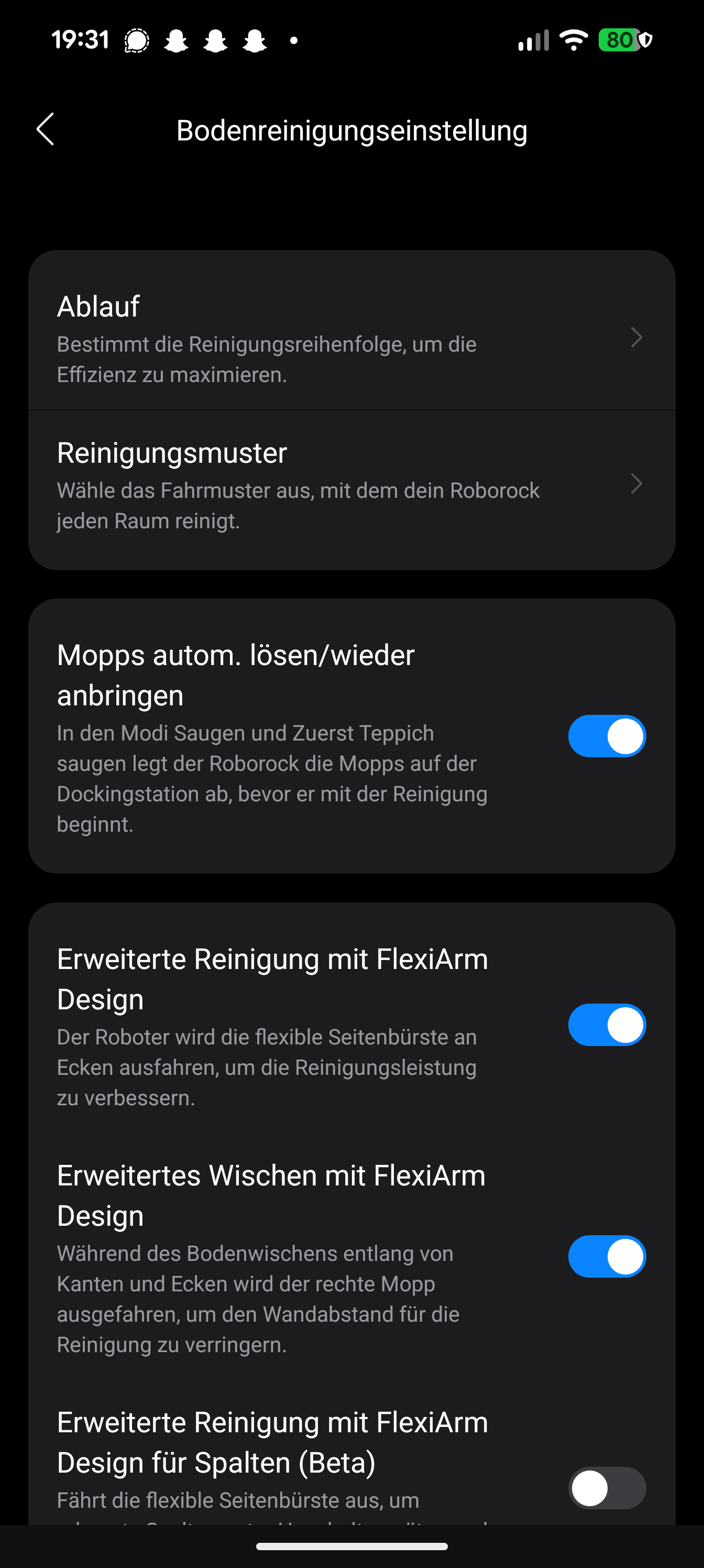
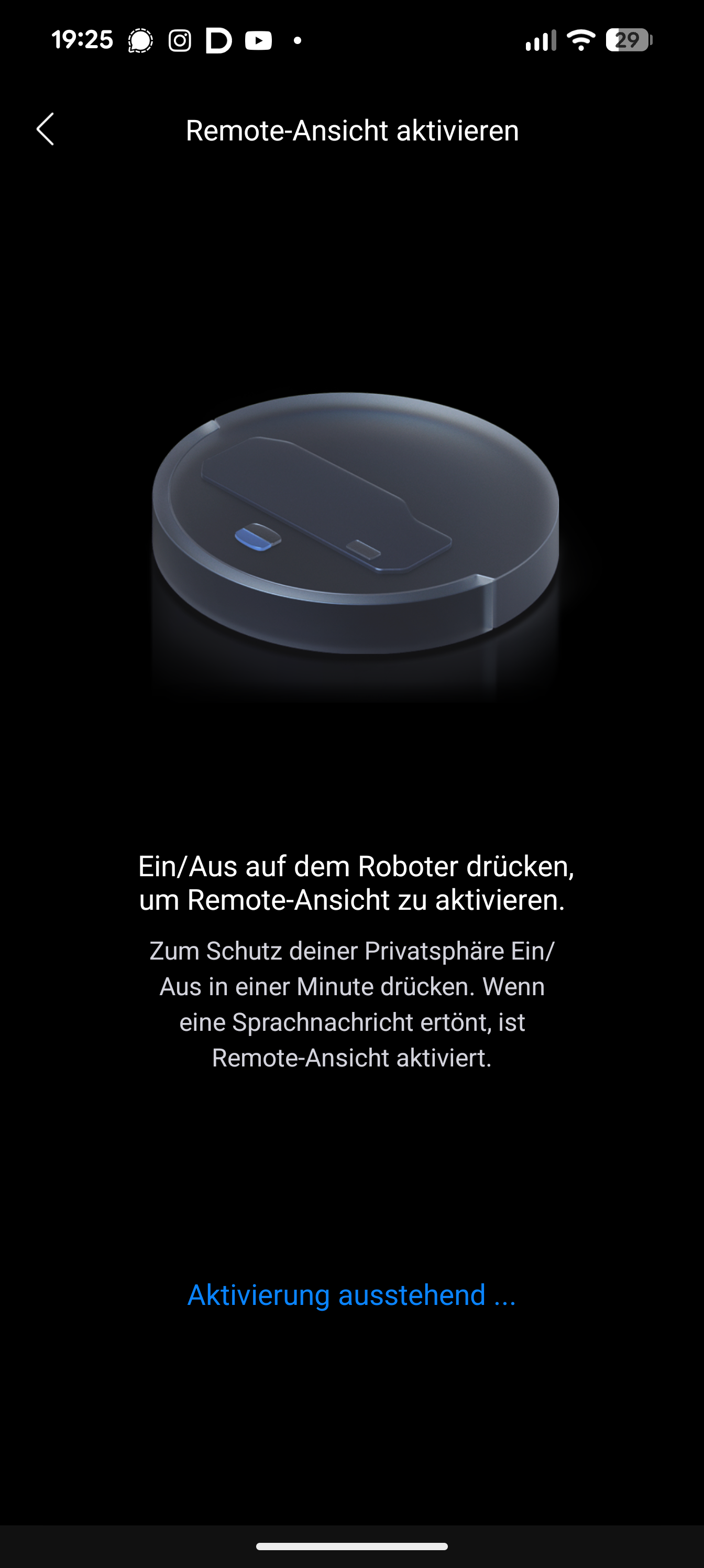
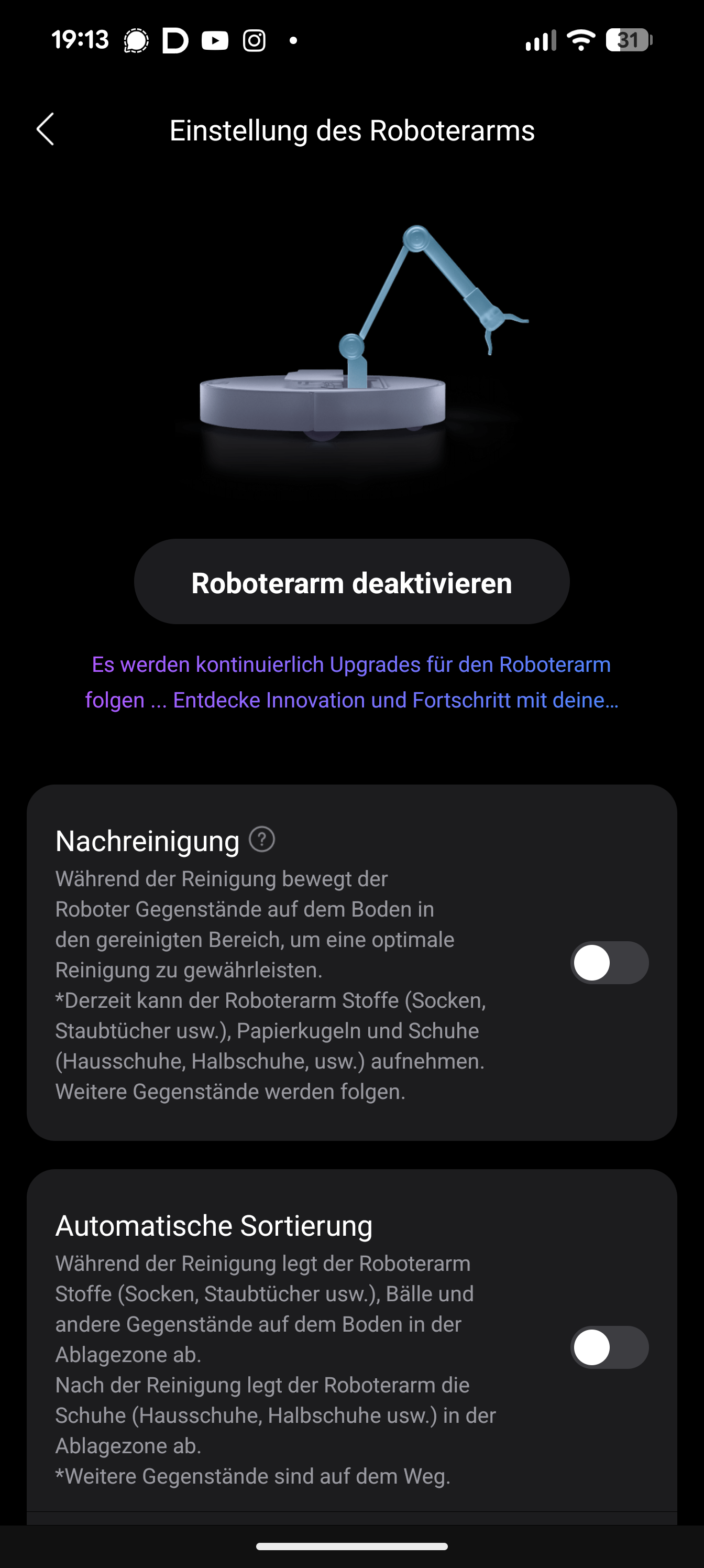
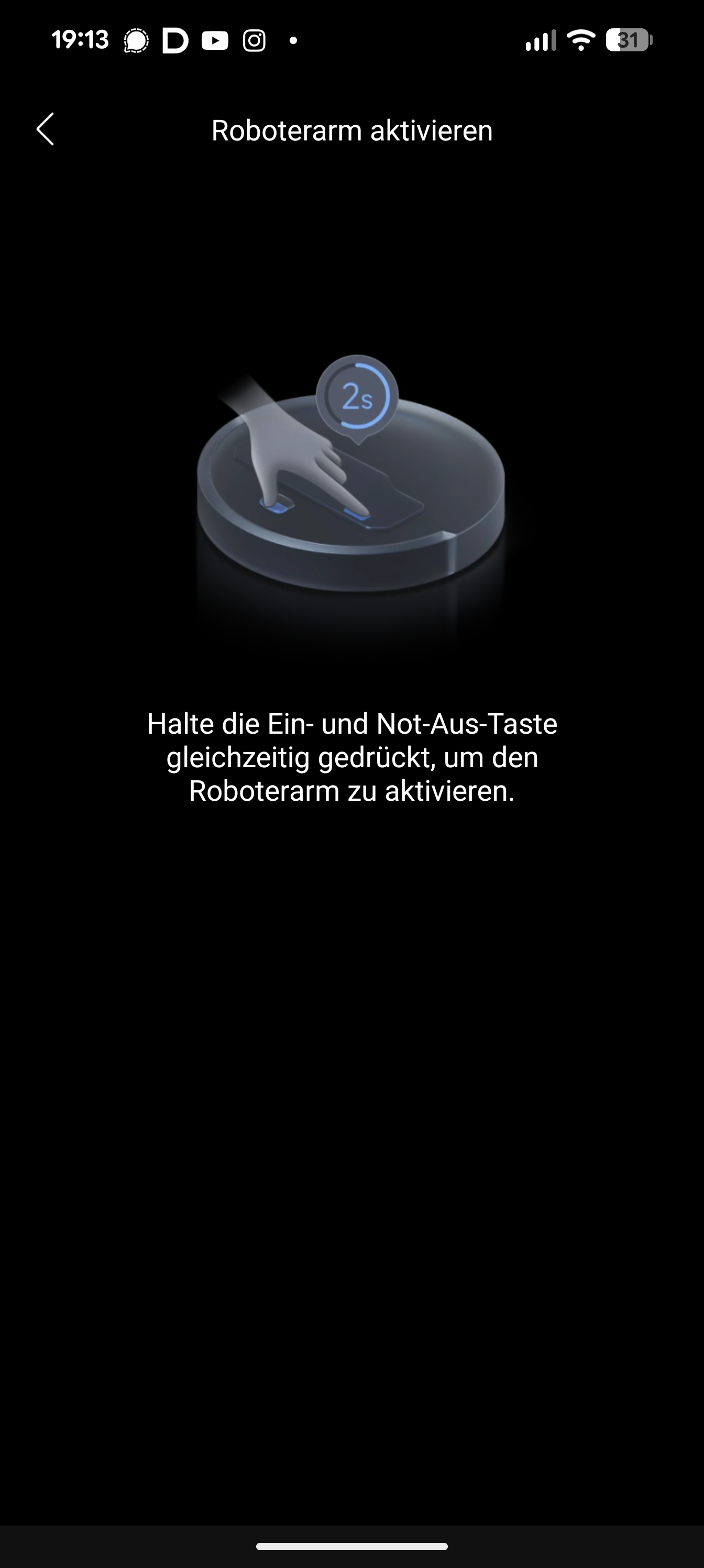
Der Greifarm muss per Tastenkombination in der App aktiviert werden – eine Sicherheitsmaßnahme gegen versehentliche Aktivierung. Die Objekterkennung zeigt erkannte Gegenstände in Echtzeit auf der Karte an, auf Wunsch auch mit Beweisfoto. Per Fingertipp lassen sich Objekte zum Aufräumen markieren oder ignorieren.
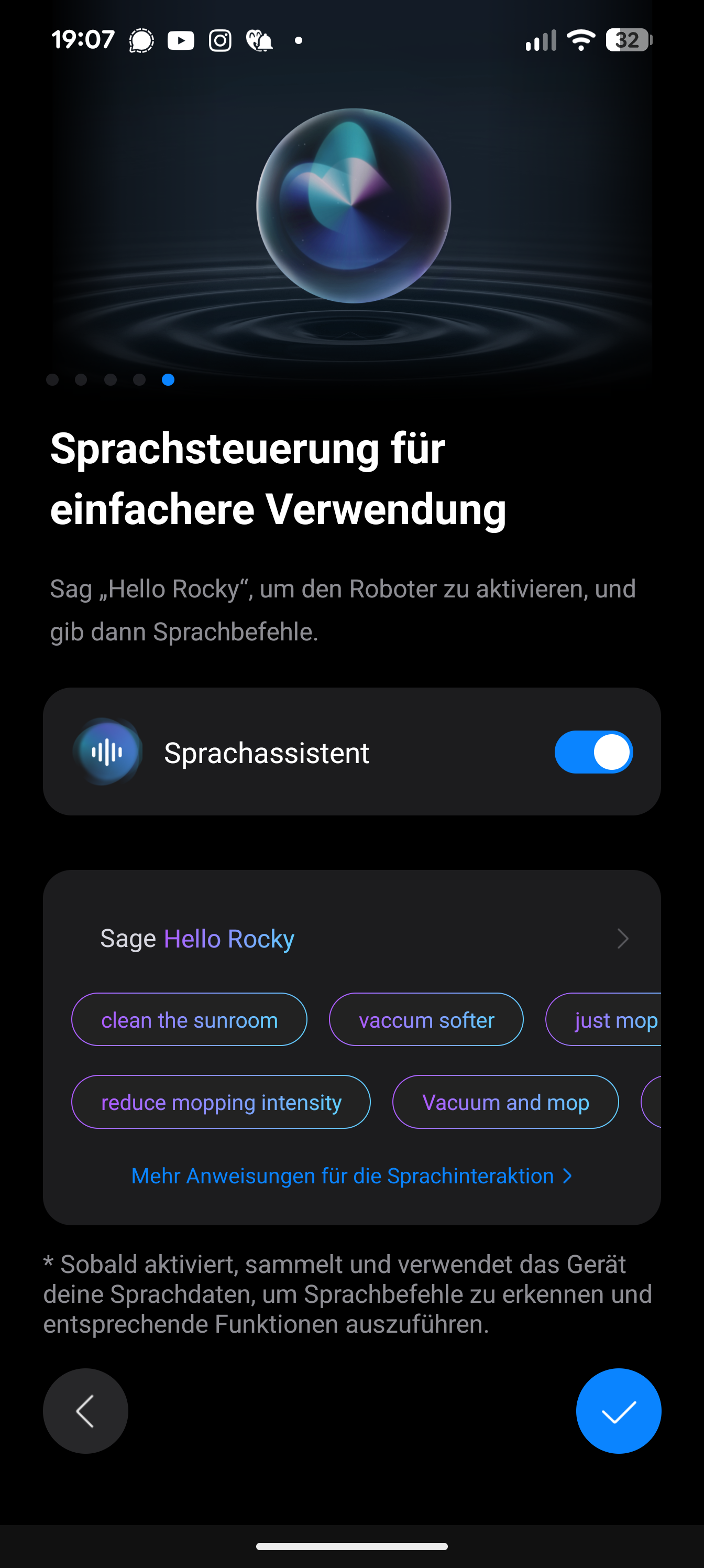
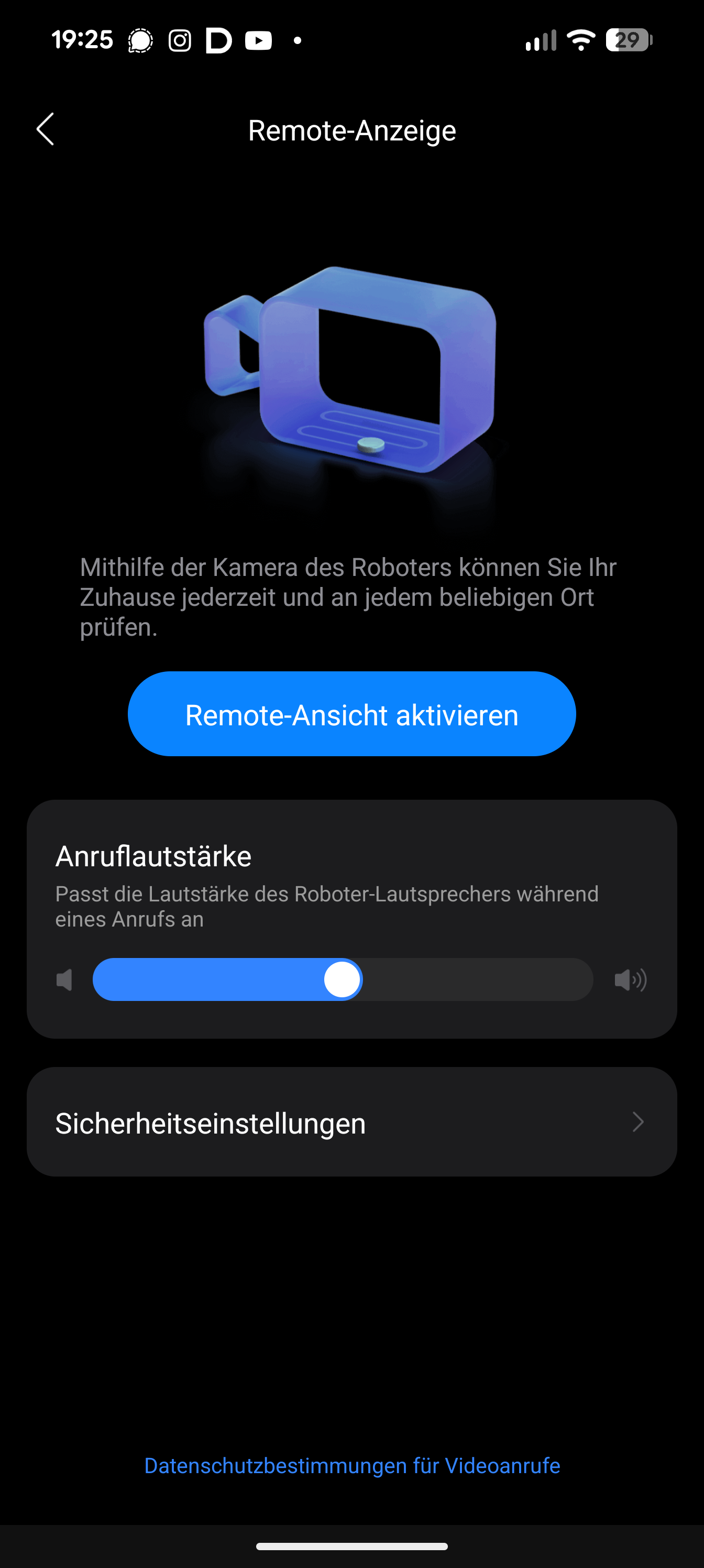
Die Live-Videostream-Funktion ermöglicht Überwachung aus der Ferne – oder das Erschrecken von Familienmitgliedern oder Haustieren. Neben den klassischen Smart-Home-Integrationen für Google Home, Alexa oder Homekit kann man den Roboter auch per Matter einfügen. Zur Sprachsteuerung kann man zudem auf den integrierten Assistenten Rocky zurückgreifen, der sich durch „Hello Rocky“ aufwecken lässt.
Navigation: Wie gut erkennt der Roborock Saros Z70 Hindernisse?
Mit drei Kameras und 3D-ToF-Navigation meistert der Z70 die meisten Situationen souverän. Die obere Kamera im Deckel erfasst die Umgebung, die Frontkamera erkennt Hindernisse, die Greifarm-Kamera prüft gefasste Objekte. Diese Kombination ermöglicht präzise 3D-Kartierung und Objekterkennung. Der Roboter erstellt detaillierte Karten mit Möbelpositionen und merkt sich dauerhafte Hindernisse.
Besonders beeindruckend ist das Klettern auf Hochflor-Teppiche: Der Roboter fährt zunächst vor, erkennt den Teppich, setzt kurz zurück, zieht Seitenbürsten und Wischmopps ein, kippt leicht nach hinten und „springt“ mit Schwung auf die Fläche. So verhindert er ein Verrutschen oder die Bildung von Falten. Die Hinderniserkennung funktioniert bei Schuhen zuverlässig, Socken und Taschentücher werden jedoch häufig übersehen. Der Arm lässt sich per App fernsteuern – praktisch für kleine Späße im Büro. Schwellen zwischen 2 und 4 cm kann er problemlos überwinden.
In engen Passagen zeigt sich der Roboter optimistisch und stößt dabei gelegentlich mit dem Stoßsensor an. Mit ausgefahrenen Wischmopps verschiebt er beim Drehen manchmal Stühle. Trotz hochwertiger Sensorik und 3D-Kartierung kommt es immer wieder zu Navigationsfehlern – etwa, wenn der Roboter versehentlich andere Bereiche reinigt als vorgegeben.
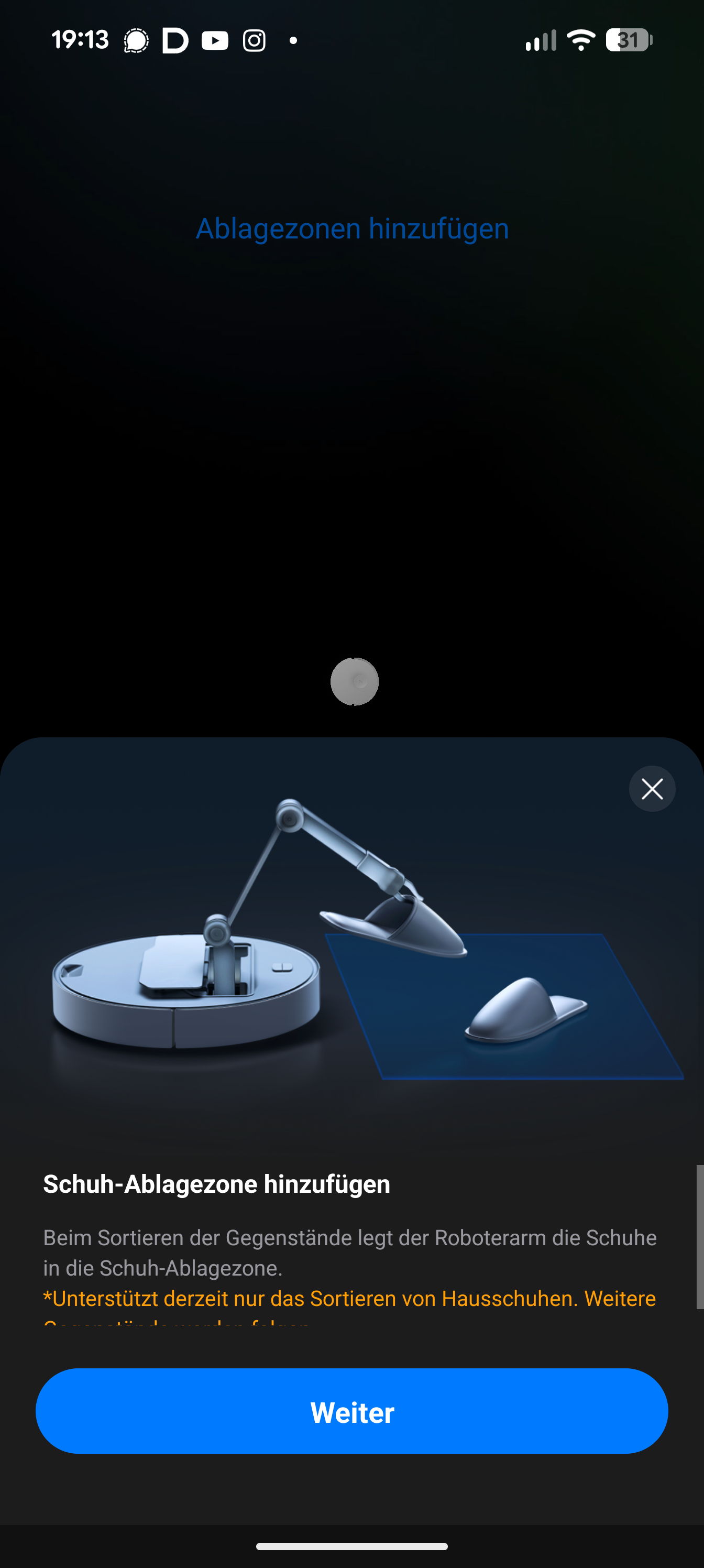
Die Hinderniserkennung funktioniert bei großen Objekten zuverlässig. Schuhe werden sicher erkannt und können per Greifarm weggeräumt werden. Bei kleineren Gegenständen zeigen sich Schwächen: Socken überfährt er häufig, Taschentücher erkennt er trotz Versprechungen nicht zuverlässig. Die 108 vorprogrammierten Objekte umfassen Möbel, Kabel, Spielzeug und Haustiere. Per Foto-Funktion lassen sich 50 weitere Objekte anlernen – in der Praxis klappt das mit gemischtem Erfolg.
Der Arm ist per App fernsteuerbar, was für unterhaltsame Momente sorgt. Die Reichweite und Beweglichkeit reichen aus, um Schuhe in Ecken zu greifen. Bei verwinkelten Positionen stößt er an Grenzen. Bleibt der Arm hängen, hilft nur manuelles Zurücksetzen per Tastenkombination.
Bei Engstellen agiert der Z70 selbstbewusst – manchmal zu selbstbewusst. Mit ausgefahrenen Wischmopps versucht er, jede Stelle zu erreichen. Beim Drehen in engen Bereichen verschiebt er dabei Stühle oder rempelt Tischbeine an. Der Stoßsensor vorn touchiert regelmäßig Hindernisse, ohne dass der Roboter sein Verhalten anpasst. Per App lässt sich ein größerer Sicherheitsabstand einstellen, was die Gründlichkeit aber reduziert.
Reinigung: Wie gut saugt und wischt der Roborock Saros Z70?
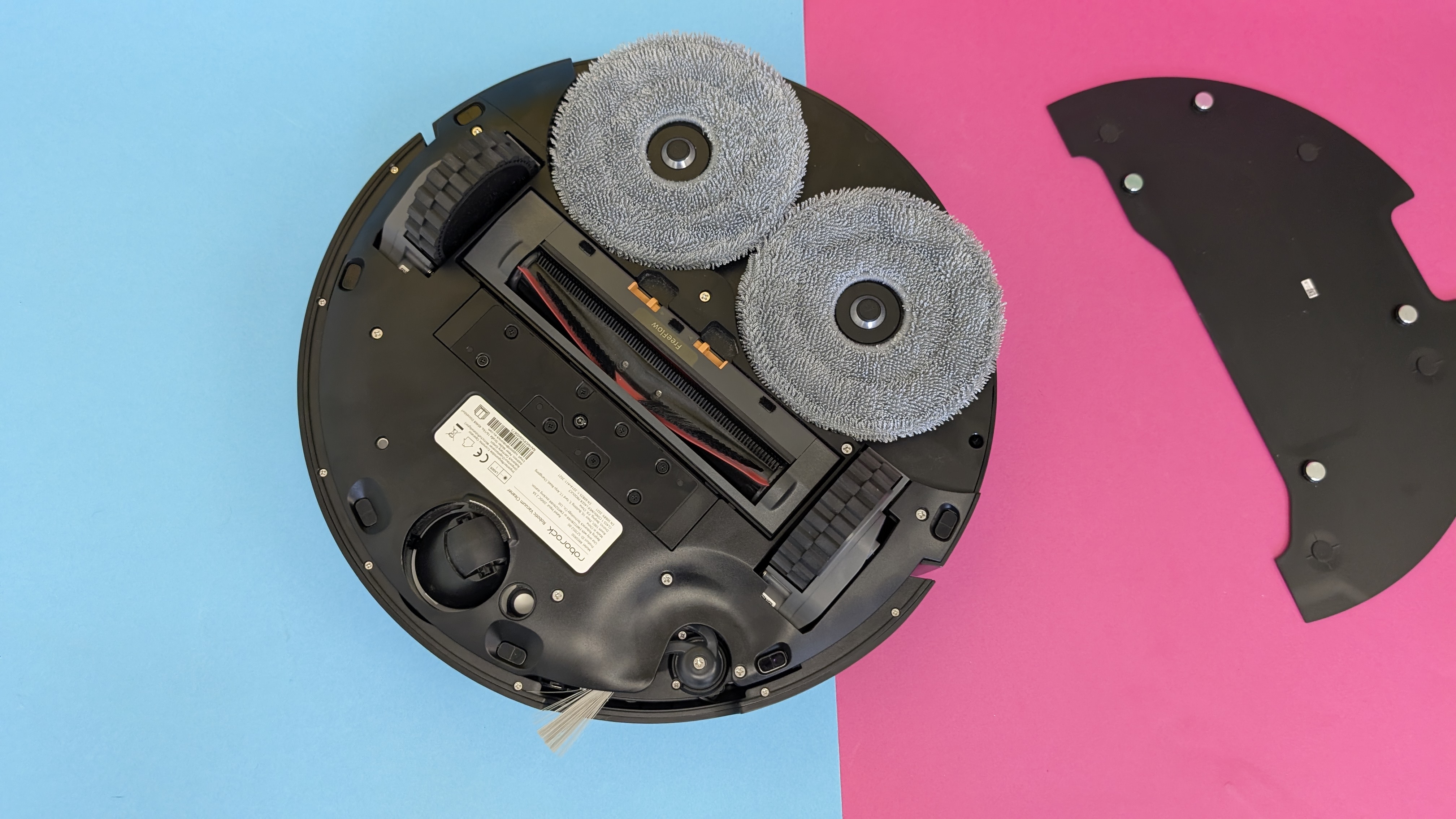
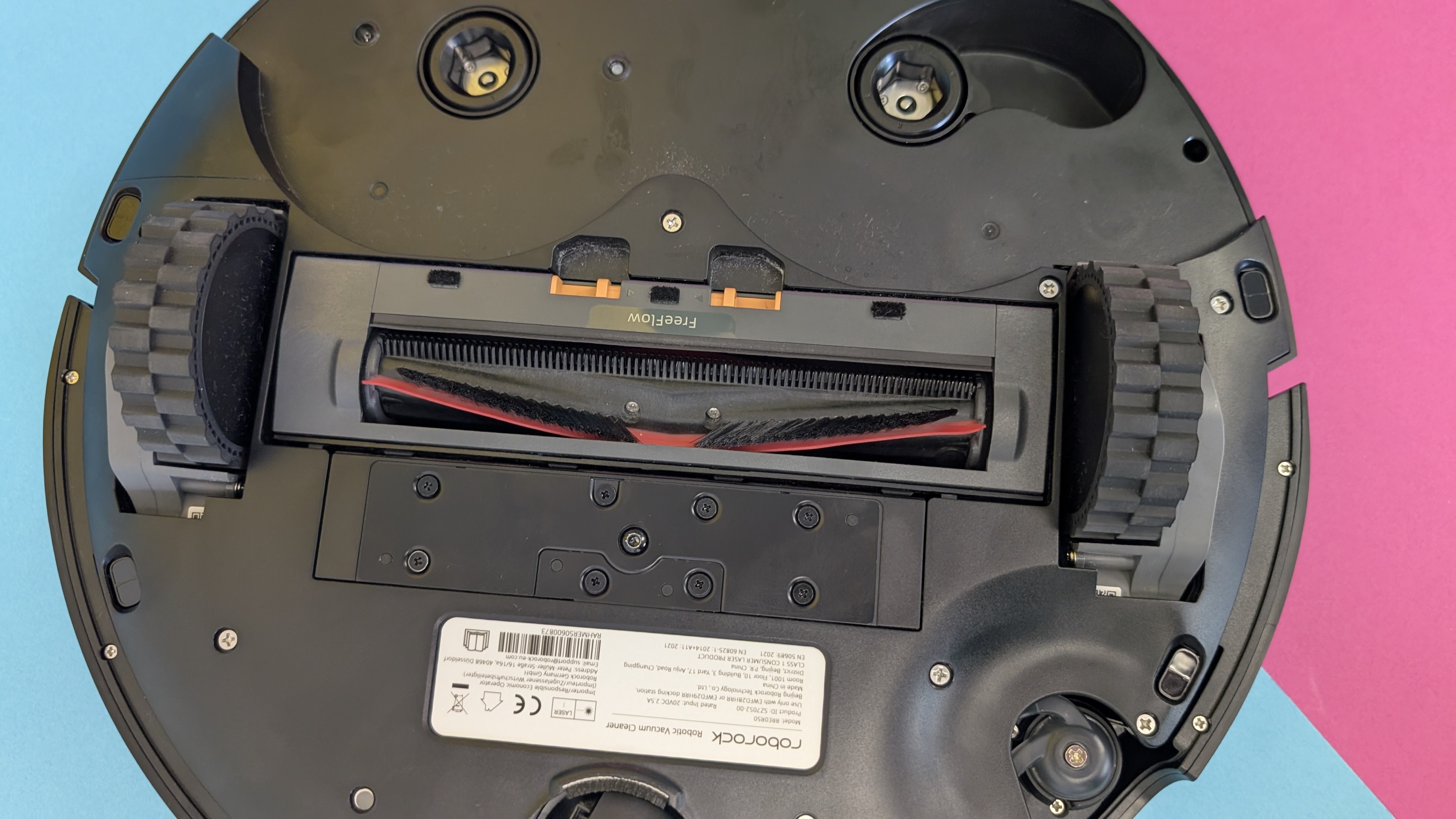
Die Saugleistung von 22.000 Pa zeigt sich in der Praxis hervorragend. Auf einem Hartboden entfernt der Z70 etwa 90 Prozent der Testkörner im ersten Durchgang. Auch auf Teppichen bleibt wenig zurück. Die ausfahrbare Seitenbürste erreicht Ecken besser als starre Varianten. Sie passt ihre Geschwindigkeit intelligent an: In Ecken dreht sie schneller, auf freier Fläche langsamer. So wird Schmutz effektiv zur Hauptbürste befördert, ohne ihn durch die Gegend zu schleudern. Das klappt im Test auch deutlich besser als bei anderen Modellen, aber nicht perfekt.
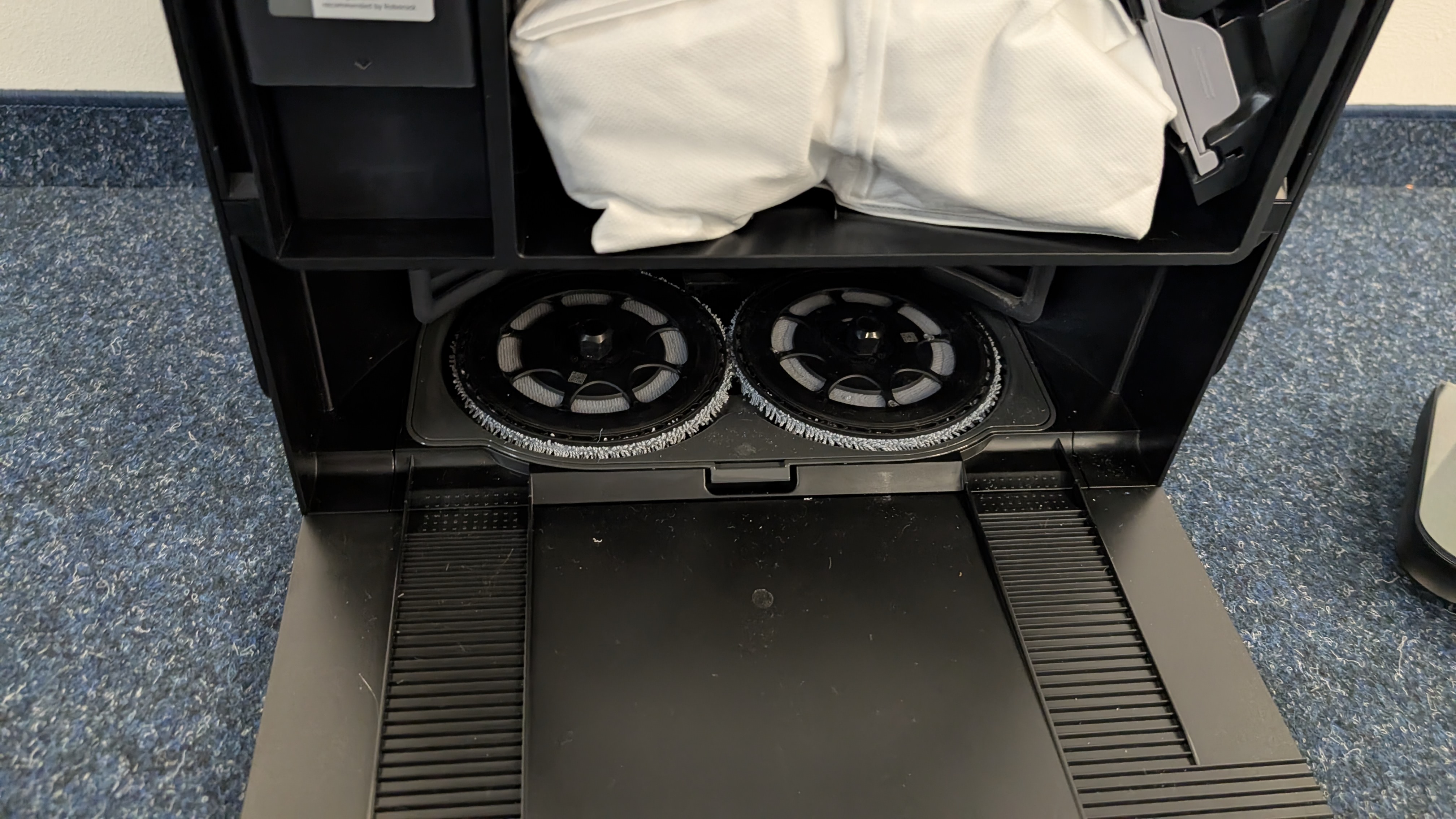
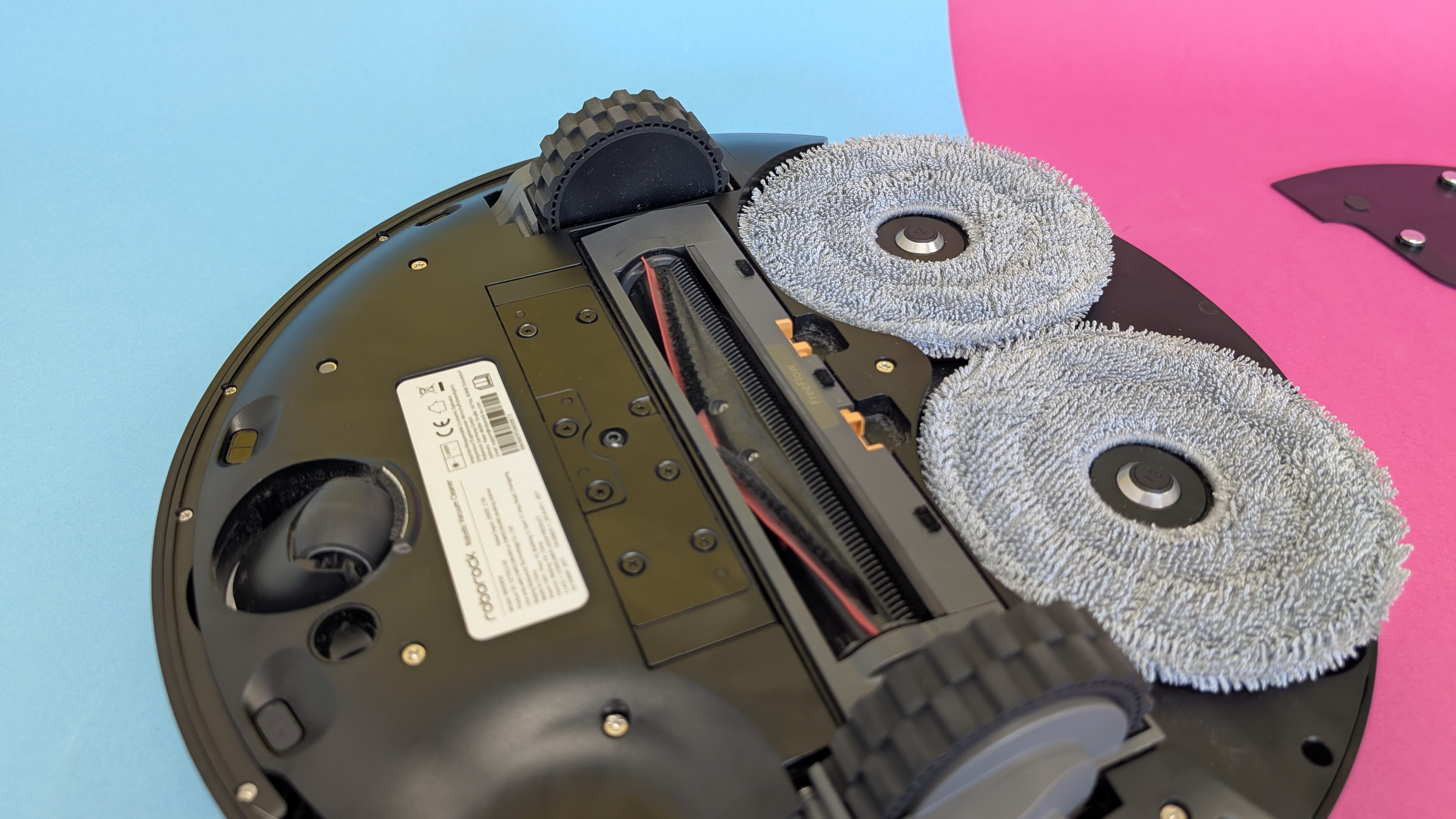
Die beiden rotierenden Wischmopps leisten für Mopps einen außergewöhnlich guten Job. Während andere Modelle feinen Schmutz verschmieren, verteilt der Z70 nur minimal Dreck. Eine aktive Frischwasserzufuhr während der Reinigungsfahrt gibt es hier aber nicht.
Roborock Saros Z70 – Reinigung
Roborock Saros Z70 – Reinigung

Roborock Saros Z70 – Reinigung

Roborock Saros Z70 – Reinigung

Roborock Saros Z70 – Reinigung

Roborock Saros Z70 – Reinigung

Roborock Saros Z70 – Reinigung

Roborock Saros Z70 – Reinigung

Roborock Saros Z70 – Reinigung

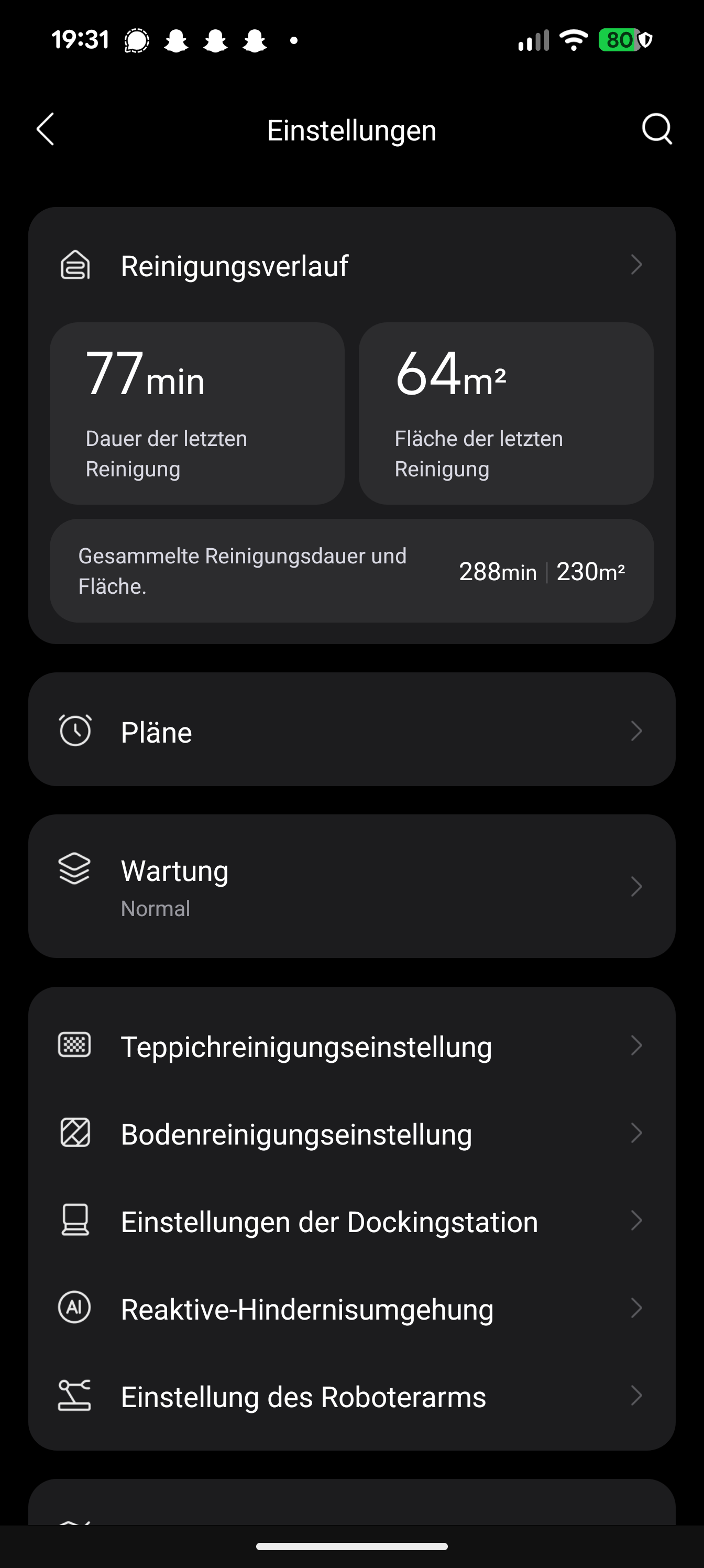
Die Mopps werden mit 80 Grad heißem Wasser in der Station gereinigt und bei 55 Grad getrocknet. Bei reinen Saugvorgängen oder auf Teppichen legt der Roboter die Mopps in der Station ab. Die Mopps heben sich bis zu 22 mm an, um Teppiche nicht zu befeuchten. Die Station saugt den Staubbehälter automatisch ab. Dabei arbeitet sie verhältnismäßig leise, das Wimmern der Absaugung kann aber auf bestimmten Frequenzen stören. Der Roboter kehrt regelmäßig zur Moppwäsche zurück, um sich von aufgesammeltem Schmutz zu bereinigen.
Akkulaufzeit: Wie lange arbeitet der Roborock Saros Z70?
Mit seinem 14,4V Li-Ionen-Akku (6,4 Ah) schafft der Z70 bis zu 3 Stunden Betriebszeit. Das reicht für große Wohnungen problemlos aus. Die Ladezeit beträgt 2,5 Stunden, was im Vergleich zur Konkurrenz recht flott ist. Der Roboter kehrt bei niedrigem Akkustand automatisch zur Station zurück und setzt die Reinigung nach dem Laden fort. Die Energieverwaltung arbeitet intelligent: Bei aktivem Greifarm und intensiver Kameranutzung sinkt die Laufzeit etwas.
Im Praxistest benötigt er für 67 m² mit wenigen Hindernissen etwa 80 Minuten und verbraucht dabei über 50 Prozent der Akkuladung bei hoher Saugleistung. Bei normaler Saugstufe und vielen Hindernissen sind es für 63 m² bereits 90 Minuten.
Die tatsächliche Laufzeit hängt stark von den Bedingungen ab: Aktiver Greifarm, intensive Kameranutzung und häufige Richtungswechsel zehren am Akku. Auf Teppichen mit maximaler Saugleistung sinkt die Reichweite deutlich.
Preis
Normalerweise kostet der Roborock Saros Z70 etwa 1799 Euro und gehört damit absolut zum Premium-Segment. Aktuell gibt es die schwarze Version bereits für 1629 Euro bei Alza. Er ist damit einer der teuersten Saugroboter am Markt. Alternativ gibt es den Saros Z70 auch mit festem Wasseranschluss ab 1789 Euro.
Für den Preis erhält man allerdings auch einzigartige Technik: Den weltweit ersten integrierten Greifarm, drei Kameras, 22.000 Pa Saugleistung und eine High-End-Station. Ob die Innovation den Aufpreis rechtfertigt, muss jeder selbst entscheiden. Vergleichbare Modelle ohne Greifarm kosten 500 bis 900 Euro weniger.
Fazit
Der Roborock Saros Z70 ist technisch beeindruckend und zeigt, wohin die Reise bei Saugrobotern geht. Die Saugleistung ist hervorragend, die Lautstärke trotzdem gering. Die Verarbeitung überzeugt, die App bietet unzählige Möglichkeiten. Der integrierte Greifarm ist eine innovative Idee, zeigt aber in der Praxis klare Grenzen. Er eignet sich nur für einfache Objekte in gut zugänglicher Position und bleibt bei komplexeren Aufgaben häufig hängen. Socken und Taschentücher erkennt er nicht zuverlässig. Als Spielerei macht der Arm Spaß, einen echten Mehrwert bietet er nur bedingt.
Für Technik-Enthusiasten mit großem Budget ist der Z70 eine Empfehlung. Wer pragmatisch denkt, bekommt für 1000 Euro weniger ähnlich gute Reinigungsleistung ohne Arm.










Künstliche Intelligenz
Analyse: Das wahre Wasserproblem Deutschlands und welche Maßnahmen nötig sind
Sauberes Trinkwasser sprudelt hierzulande wie selbstverständlich aus dem Hahn. Und das soll auch so bleiben. Es wäre falsch zu behaupten, dass Wasser flächendeckend knapp ist in Deutschland. Doch steigende Temperaturen, Dürren und extreme Wetterereignisse bedrohen unsere Talsperren und Grundwasserreserven auf vielfältige Weise.
Laut Deutschem Wetterdienst war es hierzulande seit 1931 noch nie so trocken wie 2025 von Anfang Februar bis Mitte April. Da stellt sich durchaus die Frage, ob das mit dem Trinkwasser auch weiterhin so reibungslos klappt.
- Wasser ist in Deutschland nicht knapp. Der Klimawandel und Stoffeinträge fordern aber eine Wasserwende.
- Beginnender Grundwasserstress und saisonale Extreme erfordern eine intelligentere Infrastruktur, z. B. Speicher und Schwammstadt-Konzepte.
- Wälder spielen eine Schlüsselrolle für die Wasserqualität, doch Waldsterben verschärft die Probleme; klimaresiliente Aufforstung ist ein zentraler Lösungsansatz.
- Chemische Belastungen von Gewässern, insbesondere durch Nitrat und langlebige Schadstoffe (PFAS), treiben die Kosten der Trinkwasseraufbereitung massiv in die Höhe.
- Politisches Handeln, wie das Verursacherprinzip und nachhaltige Managementstrategien, sind essenziell, um Wasserqualität und -verfügbarkeit zu sichern.
Der Artikel erklärt die direkten und indirekten Gefahren für unser Trinkwasser und zeigt auf, welche Lösungsansätze es gibt, um die Versorgung in Quantität und Qualität auch für zukünftige Generationen zu sichern.
Das war die Leseprobe unseres heise-Plus-Artikels „Analyse: Das wahre Wasserproblem Deutschlands und welche Maßnahmen nötig sind“.
Mit einem heise-Plus-Abo können Sie den ganzen Artikel lesen.
Künstliche Intelligenz
c’t-Webinar: Gamified Hacking – Lernen durch Spielen
Ihre Aufgabe führt Sie direkt in eine digitale Gruft. Mit Kali Linux und einer Portion Neugier jagen Sie versteckte Flaggen und treten am Ende gegen den Necromancer an. Hinter der Spielkulisse steckt ein intensives Hacking-Rätsel in einem abgeschotteten Netzwerk.
Im Webinar „Die Necromancer-Challenge“ führt c’t-Redakteur Wilhelm Drehling durch diese besondere CTF-Challenge (Capture The Flag).
Praxisnahe Einblicke in Hacking-Werkzeuge
Drehling hackt sich im Webinar durch alle elf Level. Um zum Ziel zu gelangen, greift er auf unterschiedliche Hacking-Tools zurück: Er klopft Server mit nmap ab, knackt Passwörter mit Hydra und analysiert den Netzwerkverkehr mit Wireshark. Dabei verzichtet er bewusst auf Fachchinesisch und trockene CVE-Tabellen. Sie gewinnen ein Gefühl dafür, wie man eine solche CTF-Challenge systematisch angeht und erfahren, wie Sie ein eigenes sicheres Hacking-Netzwerk aufsetzen.
Während des Webinars sollten Sie sich zunächst auf das Geschehen am Bildschirm konzentrieren und erst später selbst aktiv werden. Als Teilnehmer erhalten Sie Zugriff auf die Aufzeichnung sowie die begleitenden c’t-Artikel, um das Gelernte im eigenen Tempo nachzuvollziehen.
Vom Zusehen zum Selbermachen
Das c’t-Webinar richtet sich an alle Menschen, die sich fürs Hacken interessieren, egal ob Anfänger oder mit Vorkenntnissen. Sie entwickeln ein Gespür für Angriffsmethoden und lernen, Schwachstellen zu identifizieren. Wilhelm Drehling gibt zudem wertvolle Tipps zu Lernplattformen, Kali-Alternativen und hilfreichen Tools. Allgemeine Verständnisfragen können Sie jederzeit im Chat stellen.
- Datum: 16. September 2025
- Uhrzeit: 15:00 bis 18:00 Uhr
- Preis: 69,00 Euro
Zur Teilnahme benötigen Sie lediglich einen aktuellen Browser. Alle weiteren Informationen sowie Details zur Anmeldung finden Sie auf der Webseite von heise academy.
(abr)
Künstliche Intelligenz
Contracts in C++26: Evaluations-Semantik | heise online
Nachdem ich in meinem letzten Artikel Contracts in C++26: Ein tiefer Einblick in die Verträge kurz die Details von Contracts vorgestellt habe, möchte ich mich nun näher mit der sehr interessanten Evaluations-Semantik befassen.


Rainer Grimm ist seit vielen Jahren als Softwarearchitekt, Team- und Schulungsleiter tätig. Er schreibt gerne Artikel zu den Programmiersprachen C++, Python und Haskell, spricht aber auch gerne und häufig auf Fachkonferenzen. Auf seinem Blog Modernes C++ beschäftigt er sich intensiv mit seiner Leidenschaft C++.
Wenn eine Contracts Assertion auftritt, wird eine der vier Bewertungssemantiken angewendet: ignore, observe, enforce und quick-enforce. Die Tabelle gibt einen Überblick über die vier Semantiken:
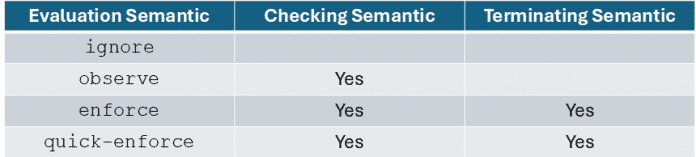
(Bild: Rainer Grimm)
Leider ist es derzeit nicht möglich, diese Evaluations-Semantiken in vollem Umfang zu sehen.
Checking-Semantik und Terminating-Semantik
Während die Checking-Semantik die Vertrags-Assertion nur auswertet, beendet die Terminating-Semantik auch das Programm.
Eine standardkonforme Implementierung muss nicht jede der vier genannten Evaluations-Semantiken implementieren. Sie kann auch ihre eigene Semantik anbieten.
ignore
Wie der Name schon sagt, ignoriert die ignore-Semantik die Auswertung des Prädikats. Dennoch muss das Prädikat syntaktisch korrekt sein.
observe
Die observe-Semantik ist eine Checking-Semantik. Im Allgemeinen können drei Bedingungen zu einer Vertragsverletzung führen:
- Die Auswertung des Prädikats gibt
falsezurück. - Die Auswertung des Prädikats verursacht eine Exception.
- Die Auswertung des Prädikats erfolgt zur Compile-Zeit, aber das Prädikat ist kein konstanter Ausdruck.
Wenn zur Compile-Zeit eine Vertragsverletzung auftritt, wird eine Diagnose ausgegeben und die Kompilierung fortgesetzt.
Wenn eine Vertragsverletzung zur Laufzeit auftritt, wird der Vertragsverletzungs-Handler aufgerufen, der auf ein Objekt vom Datentyp const std::contracts::contract_violation verweist, das Informationen über die Vertragsverletzung enthält. Wenn der Vertragsverletzungs-Handler normal zurückkehrt, wird die Programmausführung fortgesetzt.
enforce
Die enforce-Semantik ruft den Vertragsverletzungs-Handler zur Laufzeit auf. Das Programm wird beendet, wenn der Contract-Violation-Handler normal zurückkehrt. Die enforce-Semantik ist eine sogenannte terminierende Semantik. Das bedeutet, dass im Falle einer Vertragsverletzung die Programmausführung beendet wird. Danach kann eine der folgenden Aktionen erfolgen:
- Aufruf von
std::terminate, - Aufruf von
std::abortoder - sofortige Beendigung der Ausführung.
Zur Compile-Zeit wird die Kompilierung abgebrochen.
quick-enforce
Die quick-enforce-Semantik ruft den Vertragsverletzungs-Handler zur Laufzeit nicht auf. Als terminierende Semantik beendet sie das Programm sofort. In diesem Fall wird beispielsweise __builtin_trap() verwendet.
Zur Compile-Zeit wird die Kompilierung abgebrochen.
Vertragsverletzungs-Handler
Der Vertragsverletzungs-Handler hat folgende Signatur:
void handle_contract_violation( std::contracts::contract_violation );
Die Implementierung stellt den Standard-Vertragsverletzungs-Handler bereit. Sie kann jedoch auch zulassen, dass dieser Standard-Vertragsverletzungs-Handler durch einen benutzerdefinierten ersetzt wird.
In seiner ausgezeichneten Präsentation Contracts for C++ auf der ACCU 2025 stellt Timur Doumler einige spannende Beispiele für benutzerdefinierte Vertragsverletzungshandler vor:
// Protokollierung
void handle_contract_violation( std::contracts::contract_violation violation ) {
LOG(std::format("Contract violated at: {}\n", violation.location()));
}
// Setze einen Haltepunkt
void handle_contract_violation( std::contracts::contract_violation violation ) {
std::breakpoint();
}
// Warte, bis ein Debugger angeschlossen ist
void handle_contract_violation( std::contracts::contract_violation violation ) {
while (!std::is_debugger_present())
/* spin */
std::breakpoint();
}
// Stacktrace ausgeben
void handle_contract_violation( std::contracts::contract_violation violation ) {
std::cout << std::stacktrace::current(1);
}
// An den Standard-Handler für Vertragsverletzungen übergeben
void handle_contract_violation( std::contracts::contract_violation violation ) {
std::cout << std::stacktrace::current(1);
std::contracts::invoke_default_contract_violation_handler(violation);
}
Abschließend möchte ich die Schnittstelle des Objekts std::contracts::contract_violation vorstellen, das der Vertragsverletzungs-Handler empfängt:
kindgibt die Art der Vertragsverletzung zurück.semanticgibt die Evaluations-Semantik zurück, wenn die Vertragsverletzung auftritt.is_terminatinggibt zurück, ob die Evaluations-Semantik beendet wird.detection_modegibt den Grund für die Vertragsverletzung zurück.evaluation_exceptiongibt einen std::exception_ptrzur zur Ausnahme zurück, die bei der Prädikatbewertung ausgelöst wurde.commentgibt eine erklärende Zeichenfolge zur Vertragsverletzung zurück.locationgibt einenstd::source_locationzurück, der den Ort der Vertragsverletzung angibt.
Weitere Informationen zum std::contracts::contract_violation-Objekt finden sich auf der cppreference-Seite.
Wie geht es weiter?
In meinem nächsten Artikel werde ich mich auf die kleineren Features in C++26 konzentrieren. Ich beginne mit den kleinen Sicherheits-Features in der Kernsprache.
(rme)

Analyse: Das wahre Wasserproblem Deutschlands und welche Maßnahmen nötig sind

Meta testet personalisierten AI Content mit deinem Gesicht

Ayaneo Konkr Pocket Fit: Odin-3-Konkurrent startet mit Ansage auf Indiegogo

Geschichten aus dem DSC-Beirat: Einreisebeschränkungen und Zugriffsschranken

Der ultimative Guide für eine unvergessliche Customer Experience

Metal Gear Solid Δ: Snake Eater: Ein Multiplayer-Modus für Fans von Versteckenspielen
-
 Datenschutz & Sicherheitvor 3 Monaten
Datenschutz & Sicherheitvor 3 MonatenGeschichten aus dem DSC-Beirat: Einreisebeschränkungen und Zugriffsschranken
-
 UX/UI & Webdesignvor 3 Wochen
UX/UI & Webdesignvor 3 WochenDer ultimative Guide für eine unvergessliche Customer Experience
-
 Apps & Mobile Entwicklungvor 3 Monaten
Apps & Mobile Entwicklungvor 3 MonatenMetal Gear Solid Δ: Snake Eater: Ein Multiplayer-Modus für Fans von Versteckenspielen
-

 UX/UI & Webdesignvor 1 Woche
UX/UI & Webdesignvor 1 WocheAdobe Firefly Boards › PAGE online
-

 Online Marketing & SEOvor 3 Monaten
Online Marketing & SEOvor 3 MonatenTikTok trackt CO₂ von Ads – und Mitarbeitende intern mit Ratings
-
eine gute Nachricht ist")
eine gute Nachricht ist") Social Mediavor 3 Wochen
Social Mediavor 3 WochenRelatable, relevant, viral? Wer heute auf Social Media zum Vorbild wird – und warum das für Marken (k)eine gute Nachricht ist
-

 Entwicklung & Codevor 3 Wochen
Entwicklung & Codevor 3 WochenPosit stellt Positron vor: Neue IDE für Data Science mit Python und R
-

 Entwicklung & Codevor 5 Tagen
Entwicklung & Codevor 5 TagenEventSourcingDB 1.1 bietet flexiblere Konsistenzsteuerung und signierte Events