Künstliche Intelligenz
Contracts in C++26: Evaluations-Semantik | heise online
Nachdem ich in meinem letzten Artikel Contracts in C++26: Ein tiefer Einblick in die Verträge kurz die Details von Contracts vorgestellt habe, möchte ich mich nun näher mit der sehr interessanten Evaluations-Semantik befassen.


Rainer Grimm ist seit vielen Jahren als Softwarearchitekt, Team- und Schulungsleiter tätig. Er schreibt gerne Artikel zu den Programmiersprachen C++, Python und Haskell, spricht aber auch gerne und häufig auf Fachkonferenzen. Auf seinem Blog Modernes C++ beschäftigt er sich intensiv mit seiner Leidenschaft C++.
Wenn eine Contracts Assertion auftritt, wird eine der vier Bewertungssemantiken angewendet: ignore, observe, enforce und quick-enforce. Die Tabelle gibt einen Überblick über die vier Semantiken:
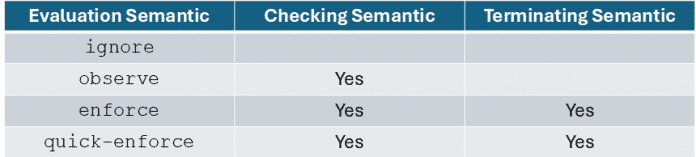
(Bild: Rainer Grimm)
Leider ist es derzeit nicht möglich, diese Evaluations-Semantiken in vollem Umfang zu sehen.
Checking-Semantik und Terminating-Semantik
Während die Checking-Semantik die Vertrags-Assertion nur auswertet, beendet die Terminating-Semantik auch das Programm.
Eine standardkonforme Implementierung muss nicht jede der vier genannten Evaluations-Semantiken implementieren. Sie kann auch ihre eigene Semantik anbieten.
ignore
Wie der Name schon sagt, ignoriert die ignore-Semantik die Auswertung des Prädikats. Dennoch muss das Prädikat syntaktisch korrekt sein.
observe
Die observe-Semantik ist eine Checking-Semantik. Im Allgemeinen können drei Bedingungen zu einer Vertragsverletzung führen:
- Die Auswertung des Prädikats gibt
falsezurück. - Die Auswertung des Prädikats verursacht eine Exception.
- Die Auswertung des Prädikats erfolgt zur Compile-Zeit, aber das Prädikat ist kein konstanter Ausdruck.
Wenn zur Compile-Zeit eine Vertragsverletzung auftritt, wird eine Diagnose ausgegeben und die Kompilierung fortgesetzt.
Wenn eine Vertragsverletzung zur Laufzeit auftritt, wird der Vertragsverletzungs-Handler aufgerufen, der auf ein Objekt vom Datentyp const std::contracts::contract_violation verweist, das Informationen über die Vertragsverletzung enthält. Wenn der Vertragsverletzungs-Handler normal zurückkehrt, wird die Programmausführung fortgesetzt.
enforce
Die enforce-Semantik ruft den Vertragsverletzungs-Handler zur Laufzeit auf. Das Programm wird beendet, wenn der Contract-Violation-Handler normal zurückkehrt. Die enforce-Semantik ist eine sogenannte terminierende Semantik. Das bedeutet, dass im Falle einer Vertragsverletzung die Programmausführung beendet wird. Danach kann eine der folgenden Aktionen erfolgen:
- Aufruf von
std::terminate, - Aufruf von
std::abortoder - sofortige Beendigung der Ausführung.
Zur Compile-Zeit wird die Kompilierung abgebrochen.
quick-enforce
Die quick-enforce-Semantik ruft den Vertragsverletzungs-Handler zur Laufzeit nicht auf. Als terminierende Semantik beendet sie das Programm sofort. In diesem Fall wird beispielsweise __builtin_trap() verwendet.
Zur Compile-Zeit wird die Kompilierung abgebrochen.
Vertragsverletzungs-Handler
Der Vertragsverletzungs-Handler hat folgende Signatur:
void handle_contract_violation( std::contracts::contract_violation );
Die Implementierung stellt den Standard-Vertragsverletzungs-Handler bereit. Sie kann jedoch auch zulassen, dass dieser Standard-Vertragsverletzungs-Handler durch einen benutzerdefinierten ersetzt wird.
In seiner ausgezeichneten Präsentation Contracts for C++ auf der ACCU 2025 stellt Timur Doumler einige spannende Beispiele für benutzerdefinierte Vertragsverletzungshandler vor:
// Protokollierung
void handle_contract_violation( std::contracts::contract_violation violation ) {
LOG(std::format("Contract violated at: {}\n", violation.location()));
}
// Setze einen Haltepunkt
void handle_contract_violation( std::contracts::contract_violation violation ) {
std::breakpoint();
}
// Warte, bis ein Debugger angeschlossen ist
void handle_contract_violation( std::contracts::contract_violation violation ) {
while (!std::is_debugger_present())
/* spin */
std::breakpoint();
}
// Stacktrace ausgeben
void handle_contract_violation( std::contracts::contract_violation violation ) {
std::cout << std::stacktrace::current(1);
}
// An den Standard-Handler für Vertragsverletzungen übergeben
void handle_contract_violation( std::contracts::contract_violation violation ) {
std::cout << std::stacktrace::current(1);
std::contracts::invoke_default_contract_violation_handler(violation);
}
Abschließend möchte ich die Schnittstelle des Objekts std::contracts::contract_violation vorstellen, das der Vertragsverletzungs-Handler empfängt:
kindgibt die Art der Vertragsverletzung zurück.semanticgibt die Evaluations-Semantik zurück, wenn die Vertragsverletzung auftritt.is_terminatinggibt zurück, ob die Evaluations-Semantik beendet wird.detection_modegibt den Grund für die Vertragsverletzung zurück.evaluation_exceptiongibt einen std::exception_ptrzur zur Ausnahme zurück, die bei der Prädikatbewertung ausgelöst wurde.commentgibt eine erklärende Zeichenfolge zur Vertragsverletzung zurück.locationgibt einenstd::source_locationzurück, der den Ort der Vertragsverletzung angibt.
Weitere Informationen zum std::contracts::contract_violation-Objekt finden sich auf der cppreference-Seite.
Wie geht es weiter?
In meinem nächsten Artikel werde ich mich auf die kleineren Features in C++26 konzentrieren. Ich beginne mit den kleinen Sicherheits-Features in der Kernsprache.
(rme)











Künstliche Intelligenz
Nicht mehr „Sam Sung“: Ex-Apple-Mitarbeiter mit neuem Namen
Eine Geschichte, die vor dreizehn Jahren in der Apple-Szene für Schmunzeln sorgte, hat nun ein (glückliches) Ende gefunden: Der ehemalige Apple-Retail-Mitarbeiter mit dem für den iPhone-Hersteller eher unpassenden Namen Sam Sung hat sich offiziell umbenannt. Aus Sam Sung wird nun „Sam Struan“, teilte der heute 36-Jährige in einem Gastbeitrag auf der US-Wirtschaftsseite BusinessInsider mit. Die Umbenennung sei auch deshalb erfolgt, weil sein Geburtsname derart viral gegangen sei.
Weiterlesen nach der Anzeige
Von Schottland nach Kanada
Struan hatte zuvor in mehreren Apple-Läden gearbeitet: Zunächst im schottischen Glasgow, später dann im kanadischen Vancouver. Struan hatte zuletzt die Stelle als „Specialist“ inne, und dafür auch entsprechende Visitenkarten. Einer der Kunden bekam diese 2012 in die Hände und postete sie schließlich auf Twitter, was eine ganze virale Welle lostrat. Struan nahm das sichtlich mit, er löschte sein LinkedIn-Profil unter dem Namen. 2013 verließ er schließlich Apple und versteigerte dann ein Jahr später Teile seiner Apple-Kleidung samt „Name Badge“ und Visitenkarten zu Gunsten einer Kinderstiftung.
Die Namensänderung nahm er dann nach eigenen Angaben vor, weil er „nicht bekannt für einen Internetwitz“ sein wollte. „Struan“ hat für ihn eine Bedeutung, das sei sein Liebingsort in Schottland. Heute sieht Struan die Situation allerdings etwas anders als noch 2012. Damals habe er befürchtet, durch den Wirbel womöglich seinen Job zu verlieren. „Ich hatte so viel Angst, ich wollte einfach nur nicht auffallen und weiter arbeiten.“ Rückblickend sei das lustig: „Ich hatte in diesem Moment wahrscheinlich die höchste Arbeitsplatzsicherheit, die ich je hatte. Hätte Apple mich gefeuert, hätte das noch mehr Aufruhr verursacht.“
Reporter im Laden auf der Suche nach Sam Sung
Damals seien Reporter in den Laden gekommen. „Apple hat mich deshalb zunächst von der Verkaufsfläche genommen.“ Seinen Kollegen habe man gesagt, ihn gegenüber Dritten nicht zu identifizieren. Visitenkarten gab es für ihn dann nicht mehr. „Die Leute kamen in den Laden und fragten, ob Sam Sung im Geschäft arbeitet. Ich habe dann so getan, als wäre ich das nicht.“ Am Telefon habe man ihn schon aufgrund seines schottischen Akzents nicht erkannt. Immerhin sei der Aufruhr dann nach einigen Monaten abgeebbt.
Struan hatte später auch ein anderes Problem: Nachdem er sich im Bereich Berufeconsulting zu etablieren versuchte, waren aufgrund des alten Namens kaum Möglichkeiten vorhanden, zur Marke zu werden. „Die Big-Tech-Firma hat schon ihre eigene Marke.“ Es sei also sinnvoll gewesen, den Namen zu ändern. Heute wünschte er, seinem jüngeren Ich sagen zu können, dass die Sache doch lustig gewesen sei. „Ich hätte mir keine Gedanken über meinen Job machen müssen.“ Besser wäre es gewesen, das LinkedIn-Profil offen zu halten und den Leuten zu danken, die sich damals bei ihm gemeldet hätten. „Ich hätte das Ganze als das, was es war, mehr genießen können.“
Weiterlesen nach der Anzeige
(bsc)
Künstliche Intelligenz
Nach Motorradunfall: Dieser Mann soll bald Roboterarm mit Gedankenkraft steuern
Ein 25-jähriger Deutscher hat als erster Querschnittsgelähmter in Europa eine Gehirn-Computer-Schnittstelle eingesetzt bekommen. Der fünfstündige Eingriff fand vor wenigen Wochen am Universitätsklinikum der Technischen Universität München (TUM) statt und ist Teil der Forschungsstudie „Künstliche Intelligenz für Neurodefizite“. Mithilfe der Schnittstelle soll Michael Mehringer zunächst lernen, allein durch seine Gedanken einen Computercursor zu bewegen und Mausklicks zu setzen, und später auch einen Roboterarm zu steuern, um Gegenstände zu greifen.
Weiterlesen nach der Anzeige
„Die Implantation war erfolgreich, wir haben Signale von allen Elektroden“, sagt Bernhard Meyer, Direktor der Klinik und Poliklinik für Neurochirurgie, der die Schnittstelle eingesetzt hat. „Und der Patient ist sehr motiviert, sodass wir nach der Einheilphase sehr rasch mit dem Recording angefangen haben“, ergänzt er. Michael Mehringer hilft nun dabei, KI-Algorithmen darauf zu trainieren, den Zusammenhang zwischen gedachten Bewegungen und den dabei entstehenden Nervenzellsignalen zu erkennen.

Prof. Simon Jacob mit Michael Mehringer
(Bild: Kathrin Czoppelt / TUM Klinikum)
Dafür beobachtet der Proband die Bewegung eines Cursors auf dem Bildschirm und soll sich vorstellen, ihn zu bewegen, erklärt die Biomediziningenieurin Melissa Zavaglia vom Institut für Robotik und Maschinenintelligenz München an der TUM. Die Forschenden können aus den neuronalen Signalen schon recht gut ablesen, welche Bewegungen er sich vorstellt.
Sobald das Training der Decodier-Software abgeschlossen ist, sollen „in naher Zukunft“ Echtzeit-Experimente folgen, bei denen der Cursor auf gedachte Bewegungen reagiert. „Wir hoffen, dass wir seine Gehirnsignale später auch zur Steuerung eines Roboters für Aktivitäten des täglichen Lebens nutzen können. Wir werden verschiedene Tests durchführen und sehen, was für ihn am besten funktioniert, ob er dabei an eine bestimmte Bewegung denken muss oder nicht“, sagt Zavaglia.
Klein wie ein Fingernagel
Das eingepflanzte BCI besteht aus vier „Utah Arrays“, die jeweils etwa so groß wie ein kleiner Fingernagel sind. Mit 64 Elektroden detektieren diese Chips elektrische Aktivität von je ein bis zwei Nervenzellen. Insgesamt verfügt Mehringers Schnittstelle also über 256 Elektroden. Zwei Chips implantierte Meyer im motorischen Bewegungsareal, das für den rechten Arm und Hand zuständig ist. Je ein Array setzte der Neurochirurg in das benachbarte Gebiet für Bewegungsplanung und in das ebenfalls benachbarte Feedback-Areal, das aus dem Körper Rückmeldungen darüber erhält, ob die Bewegung richtig ablief.
Weiterlesen nach der Anzeige
Zuvor hatten die Chirurgen sorgfältig kartiert, wo die Zielregionen in Mehringers Gehirn liegen. Wichtig war auch, die gebündelten Kabel jedes Chips knick- und drehungsfrei zu verlegen und schließlich in einem gemeinsamen Metallsockel zusammenzuführen, der durch den Schädelknochen und die Haut ragt. Weil er ein Außengewinde besitzt, lässt sich an ihm dann ein Stecker anschrauben, der zum auswertenden Computer führt.
In Deutschland leben laut dem TUM-Klinikum etwa 140.000 Menschen mit Querschnittslähmung. Durch Unfälle, Tumore, Entzündungen oder Veränderungen der Wirbelsäule kommen jährlich rund 2.400 Betroffene neu hinzu. Viele von ihnen leben Jahrzehnte mit ihrer starken Einschränkung und sind abhängig von Angehörigen und Pflegekräften. Auch Mehringer hofft deshalb für die Zukunft, „dass ich wieder selbständig essen und trinken kann und etwas weniger Hilfe im Alltag benötige.“

Prof. Jacob mit Implantat
(Bild: Juli Eberle / TUM)
Utah Arrays gehören zu den etabliertesten BCI. Weltweit wurden bereits etwa drei Dutzend von ihnen bei Menschen eingesetzt. Hersteller ist das US-Unternehmen Blackrock, das vom deutschen Elektroingenieur Florian Solzbacher von der University of Utah mitgegründet wurde, der auch sein Wissenschaftsvorstand ist.
Gehirnschnittstelle soll auch beim Kommunizieren helfen
Insgesamt ist Mehringer der zweite Patient in Europa, der eine solche Vierfach-Schnittstelle erhalten hat. Bereits 2022 war sie ebenfalls am TUM-Klinikum einer Patientin eingesetzt worden, die nach einem Schlaganfall einen Großteil ihrer Sprachfähigkeit verloren hat. Sie verstand immer noch alles, konnte aber nur noch einzelne Worte sagen und nicht mehr alle „ihre Gedanken nach draußen transportieren – ein extrem berührender und auch sehr schlimmer Zustand“, berichtet der Neurologe Simon Jacob, der ebenfalls an der Studie beteiligt ist. „Bei ihr wollen wir Sprache dekodieren, welche Wörter sie gerne sagen würde.“ Das sei viel schwieriger als bei motorischen Signalen. Es gäbe durchaus interessante Arbeiten, bei denen einzelne Sprachlaute – die sogenannten Phoneme – dekodiert und zu Worten zusammengesetzt würden, es sei aber sehr aufwendig.
Große Sprachmodelle erlaubten künftig eine bessere, schnellere Strategie: Man fängt sozusagen an, ein Wort zu „tippen“ und die KI „ergänzt es auf sehr intelligente Art und Weise“, so Jacob. Sie schließe auf die beabsichtigte Sprachproduktion und könnte den Patienten erlauben, „viel natürlicheren Output zu generieren“, zumal die von Computern erzeugte Sprache inzwischen viel flüssiger und nicht mehr roboterhaft ist. Dabei könne auch die Privatsphäre gut gewahrt werden, denn alle elektrischen Sprachsignale im Gehirn seien einem viel stärkeren Intentionssignal aufgesetzt, das angibt, ob etwas fürs Denken oder Aussprechen gedacht ist.
Weil nun das Sprachbildungszentrum der Patienten, das in der linken Hirnhälfte sitzende Broca-Areal beim Schlaganfall zerstört wurde, implantierte das Neurochirurgenteam die Arrays in demselben Gebiet in der rechten Gehirnhälfte. Von dieser war aus magnettomografischen Untersuchungen bekannt, dass es hier ebenfalls Sprachsignale gibt. „Wir sind aber die ersten, die mit Elektroden hineingeschaut und gesehen haben, dass hier tatsächlich fast jede Nervenzelle mit Sprachfunktionen befasst ist“, sagt Jacob. „Fast alles ist aktiv, wenn die Patientin versucht zu sprechen und wenn sie Sprache hört.“ Diese Ergebnisse sollen bald veröffentlicht werden.
Nun suchen die Münchener Forschenden für die Studie nach weiteren jungen, motivierten Erwachsenen mit hoher Querschnittslähmung. Wichtig sei, dass sie an Forschung teilnehmen und nicht an einer erprobten Heilung, sagt Jacob. Mehringer hatte sich von seinem schweren Motorradunfall mit 16 Jahren und den darauffolgenden 14 Monaten Klinik, mit Koma, Intensivstation und zahlreichen Operationen nicht entmutigen lassen. „Ich bin immer positiv. Ich habe immer viel Hoffnung. Das ist mein Antrieb.“
Dieser Beitrag ist zuerst auf t3n.de erschienen.
(jle)
Künstliche Intelligenz
Microsoft Teams kann ab Dezember Büroanwesenheit erfassen
Ein Update der Kollaborationssoftware Microsoft Teams, das ab Dezember 2025 ausgerollt werden soll, könnte das Arbeiten im Homeoffice für manchen zur Herausforderung machen. Der IT-Riese plant, über eine neue Funktion die tatsächliche Anwesenheit im Bürogebäude zu erfassen. Konkret soll Teams erkennen, ob sich der Nutzer mit dem unternehmenseigenen WLAN verbunden hat, und daraufhin automatisch den Arbeitsort entsprechend dem jeweiligen Gebäude festlegen.
Weiterlesen nach der Anzeige
Bisher gibt es in Teams schon die Möglichkeit, den Arbeitsort manuell zu bestimmen. Das ist etwa dafür gedacht, Kollegen in einem großen Bürokomplex oder auf einem Campus die Orientierung zu erleichtern. Mit der bevorstehenden Aktualisierung soll dieser Vorgang automatisiert werden, indem die Software – wahrscheinlich durch den Abgleich von Details wie IP-Adresse oder MAC-Adresse des Routers – feststellt, ob man wirklich vor Ort ist.
Diese Neuerung, die das Unternehmen auf seinem aktuellen Fahrplan für das cloudbasierte Büropaket Microsoft 365 angekündigt hat, verschafft Vorgesetzten eine klare Übersicht darüber, wo sich ihre Mitarbeiter gerade befinden. Laut der Roadmap ist das Feature sowohl für Windows als auch macOS geplant. Das Technik-Portal Tom’s Guide gibt zu bedenken: Für alle, die im Homeoffice eine Oase der Ruhe und Produktivität gefunden haben, stelle das Update eine potenzielle Bedrohung dar. Teams könnte künftig als „Petze“ fungieren.
Technische Details noch unbekannt
Microsoft hat klargestellt, dass die Funktion zunächst standardmäßig nicht eingeschaltet sein wird. Die Aktivierung liegt letztlich in der Hand der IT-Verantwortlichen im Unternehmen. Eine Zustimmung der Endnutzer ist erforderlich.
Die Debatte über die automatisierte Standorterkennung erinnert an eine Taktik, die sich nach der Corona-Pandemie etwa Amazon-Mitarbeiter zunutze machten. Um die umstrittene Rückkehr ins Büro zu umgehen, versuchten einige, den Namen ihres privaten WLANs (SSID) so zu ändern, dass er dem des offiziellen Firmennetzwerks entsprach. Tom’s Guide geht indes davon aus, dass eine Anwendung wie Microsoft Teams diesen einfachen Trick durch Prüfmechanismen durchschauen wird. Technische Details zur Umsetzung der neuen Funktion hat der Konzern bislang nicht verraten.
Wie steht es mit dem Datenschutz?
Die automatische Erfassung des Arbeitsortes wirft Fragen zum Datenschutz auf. Obwohl die Funktion darauf abzielt, die hybride Zusammenarbeit zu vereinfachen, beunruhigt der Gedanke der ständigen Überwachung viele Mitarbeiter. Microsoft hält in der Roadmap dagegen: Die Funktion könne nicht heimlich aktiviert werden. Admins dürften nicht im Namen der betroffenen Anwender einwilligen.
Weiterlesen nach der Anzeige
Die Erkennung basiert auf der SSID des Büros, die Techniker im System hinterlegen müssen. Letzteres weiß also: die Verbindung mit diesem bestimmten Netz bedeutet, dass sich der Mitarbeiter in einem gewissen Gebäude befindet. Microsoft Teams verwendet Geodaten bereits für andere Funktionen wie Notrufe und die Verbesserung der Anrufqualität.
Die skizzierte Funktion erfasst den Standort nur in Bezug auf das Unternehmens-WLAN und setzt den Status des Nutzers auf das hinterlegte Gebäude. Sie ist nicht darauf ausgelegt, eine ständige Geolokalisierung außerhalb der Arbeitsumgebung durchzuführen. Microsoft bezeichnet die Funktion als „neutral“. Kritiker betonen aber, dass die unternehmensinterne Richtlinie entscheidend sei. Werde das Feature als Kontrollinstrument missbraucht, könne sie das Vertrauen in das Hybrid-Arbeitsmodell untergraben.
DSGVO und Betriebsverfassungsgesetz
Die Funktion könnte grundsätzlich mit der Datenschutz-Grundverordnung (DSGVO) vereinbar sein. Auf jeden Fall nötig wäre dafür die strikte Einhaltung mehrerer Bedingungen durch das Unternehmen, das das Feature verwenden will. Die rechtliche Zulässigkeit hängt im Wesentlichen von der Einwilligung der Mitarbeiter und dem Zweck der Datenerfassung ab. Das Unternehmen muss die freiwillige und informierte Zustimmung jedes einzelnen Mitarbeiters einholen. Es darf die Funktion primär nur zum Verbessern der Kollaboration einsetzen und nicht als Überwachungsinstrument. Zudem müssen die Transparenzpflichten erfüllt sein.
In Deutschland oder einem Staat mit ähnlichem Arbeitsrecht, das ein Mitbestimmungsrecht vorsieht, muss die Firma eine Betriebsvereinbarung abschließen. Das soll Kontrollmissbrauch ausschließen. Ohne die Freiwilligkeit der Mitarbeiter und klare Regeln zur Nutzung würde die Funktion wahrscheinlich gegen geltendes europäisches und deutsches Datenschutz- und Arbeitsrecht verstoßen.
Entsprechende Firmenvorhaben müssten vor allem arbeitsrechtlich geprüft werden, erläutert Niko Härting von der gleichnamigen Berliner Kanzlei gegenüber heise online: „Da geht es um das Persönlichkeitsrecht am Arbeitsplatz.“ Ein kontinuierliches Tracken dürfte rechtswidrig sein, solange es kein gewichtiges Interesse des Arbeitgebers gebe, um so einen tiefen Grundrechtseingriff zu rechtfertigen. Das könnte etwa in der Logistikbranche der Fall sein, führt der Anwalt aus. Sei ein Betriebsrat vorhanden, müsste dieser zustimmen. Bei der Einwilligung dürften Datenschutzrechtler zudem die Freiwilligkeit bezweifeln, wenn etwa Ängste vor Jobverlust eine Rolle spielen könnten.
(nie)

Nicht mehr „Sam Sung“: Ex-Apple-Mitarbeiter mit neuem Namen

Nach Motorradunfall: Dieser Mann soll bald Roboterarm mit Gedankenkraft steuern

Microsoft Teams kann ab Dezember Büroanwesenheit erfassen

Der ultimative Guide für eine unvergessliche Customer Experience

Adobe Firefly Boards › PAGE online
eine gute Nachricht ist")
Relatable, relevant, viral? Wer heute auf Social Media zum Vorbild wird – und warum das für Marken (k)eine gute Nachricht ist
-
 UX/UI & Webdesignvor 2 Monaten
UX/UI & Webdesignvor 2 MonatenDer ultimative Guide für eine unvergessliche Customer Experience
-
 UX/UI & Webdesignvor 2 Monaten
UX/UI & Webdesignvor 2 MonatenAdobe Firefly Boards › PAGE online
-
eine gute Nachricht ist") Social Mediavor 2 Monaten
Social Mediavor 2 MonatenRelatable, relevant, viral? Wer heute auf Social Media zum Vorbild wird – und warum das für Marken (k)eine gute Nachricht ist
-

 Entwicklung & Codevor 2 Monaten
Entwicklung & Codevor 2 MonatenPosit stellt Positron vor: Neue IDE für Data Science mit Python und R
-

 Entwicklung & Codevor 2 Monaten
Entwicklung & Codevor 2 MonatenEventSourcingDB 1.1 bietet flexiblere Konsistenzsteuerung und signierte Events
-

 UX/UI & Webdesignvor 1 Monat
UX/UI & Webdesignvor 1 MonatFake It Untlil You Make It? Trifft diese Kampagne den Nerv der Zeit? › PAGE online
-

 UX/UI & Webdesignvor 1 Woche
UX/UI & Webdesignvor 1 WocheIllustrierte Reise nach New York City › PAGE online
-

 Social Mediavor 1 Monat
Social Mediavor 1 MonatSchluss mit FOMO im Social Media Marketing – Welche Trends und Features sind für Social Media Manager*innen wirklich relevant?