Künstliche Intelligenz
Top 8: Die besten Poolroboter mit und ohne App für kleine & große Pools im Test
Poolroboter halten Wasser sowie Becken sauber und sparen Zeit. Wir zeigen die besten Modelle aus unseren Tests von Aiper, Dreame, Beatbot & Co.
Ein Poolroboter übernimmt die Routinearbeit im Becken: Er sammelt Blätter, Sand und Pollen vom Boden, viele Modelle erklimmen zusätzlich Wände und fahren die Wasserlinie ab. Das entlastet die Filteranlage, reduziert Nacharbeit mit Kescher und Bürsten und hilft, die Wasserqualität konstant zu halten. Für unsere Bestenliste haben wir insgesamt acht Poolroboter getestet. Wir zeigen, wie stark sich Navigation, Saugleistung, App-Komfort und Wartung im Alltag unterscheiden – vom High-End-Gerät mit Skimmer- und Multizonen-Modus bis zum preisbewussten Kameranavigator.
Welcher ist der beste Poolroboter?
Testsieger ist der Aiper Scuba X1 Pro Max für 1899 Euro. Für das Modell spricht die hohe Förderleistung sowie die vollständige Abdeckung von Boden, Wänden und Wasserlinie, Rückkehrfunktion, Oberflächenmodus und kabelloses Laden.
Preis-Leistungs-Sieger ist der Dreame Z1 Pro ab 1099 Euro. Er bietet systematische Reinigung mit Wasserlinie, Spotreinigung und Rückruf zur Oberfläche, kleine Abzüge gibt es wegen der Kabel-Ladung. Unser Tipp für Preisbewusste ist zudem der Wybot C2 Vision ab 657 Euro (Rabatt-Code 5B1NDUXW) mit kameragestützter Navigation, sauberen Ergebnissen und moderatem Preis.
Unser Ranking auf einen Blick:
Testsieger
Aiper Scuba X1 Pro Max
Der Aiper Scuba X1 Pro Max für 1899 Euro fährt konsequent systematisch: Bodenränder, S-Muster am Boden, anschließend Wände bis über die Wasserlinie. Neun Motoren und 40 Sensoren sorgen für präzise Kurswahl, Multizonen- und Skimmer-Modus erweitern den Einsatzbereich. Mit bis zu 32.000 l/h gehört er zu den stärksten Geräten im Test.
- hervorragende Reinigungsleistung
- Filter leicht zu reinigen
- Rückkehr-Funktion
- Unterwassersteuerung nur gegen Aufpreis
- teuer
- Filterwechsel etwas schwierig
Preis-Leistungs-Sieger
Dreame Z1 Pro
Der Dreame Z1 Pro überzeugt mit solider, zügiger Abdeckung und sehr guten Ergebnissen am Boden, in Ecken/Kanten sowie an der Wasserlinie. Rückruf zur Oberfläche und Spotreinigung erleichtern den Alltag, experimentelle App-Funktionen bringen Extras. Für die Preisklasse stark: Saugleistung bis ~30.000 l/h. Abzüge gibt es für das Laden per magnetischem Kabel statt Station. Ebenfalls nervig: die Fernbedienung erfordert präzises Zielen auf den Poolroboter, damit dieser reagiert. Dennoch bietet er mit 1099 Euro auf Ebay (Z1 ohne Remote 699 Euro) das stimmigste Paket fürs Geld.
- Steuerung per Fernbedienung
- solide Reinigungsleistung
- kehrt von allein zur Oberfläche zurück
- Spotreinigung möglich
- Fernbedienung muss genau auf den Z1 Pro zeigen
- laden per Kabel
- keine Fein-Filter-Option
Schnäppchen
Wybot C2 Vision
Kamera-Navigation zum moderaten Preis: Der Wybot C2 Vision kartiert das Becken, fährt Routen zielgerichtet ab und liefert saubere Ergebnisse an Boden, Wänden und Wasserlinie. Die App bietet Pläne und Protokolle, der Lieferumfang ist gut. Kritik: Filterentleerung bleibt umständlich und die App verlangt anfangs etwas Einarbeitung. Bei Geekmaxi gibt es den Wybot C2 Vision mit dem Rabatt-Code 5B1NDUXW für 657 Euro – eine attraktive Wahl für preisbewusste Nutzer, die auf clevere Navigation nicht verzichten möchten.
- günstiger Preis
- KI-Schmutzerkennung
- viele Reinigungsmodi
- Probleme mit der App
- Stufenreinigung könnte besser sein
- kein drahtloses Laden
Ratgeber
So haben wir bewertet
Die Gesamtnote (0–5 Sterne, in halben Schritten) setzt sich aus folgenden Kriterien zusammen:
- Reinigung & Abdeckung: 40 Prozent
- Navigation & Hindernisvermeidung: 20 Prozent
- Bedienung & App: 15 Prozent
- Wartung & Pflege: 15 Prozent
- Akku & Laufzeit: 5 Prozent
- Preis/Leistung: 5 Prozent
Getestet haben wir die Reinigung von Boden, Ecken/Kanten und Wasserlinie, die Navigation (z. B. S-/N-Muster, Randfahrten, Kartierung), den Filterzugang und die Filterfeinheit. Außerdem flossen Komfortfunktionen wie Rückkehr- oder Parkposition, Skimmer- und Multizonen-Modus sowie – falls vorhanden – die Qualität der App mit Zeitplänen und Protokollen in die Bewertung ein.
Technische Daten
Was macht einen guten Poolroboter aus?
Ein guter Poolroboter muss zum Becken passen. Entscheidend sind die Abdeckung, die Navigation und die Wartungsfreundlichkeit.
Wer nur den Boden eines kleinen, runden Beckens reinigen möchte, kommt meist mit einem einfachen Modell ohne App aus.
In großen, rechteckigen oder komplex geformten Pools punkten Geräte mit systematischer Navigation – zum Beispiel mit Gyroskop- oder Kameraführung, klaren S- oder N-Bahnen und Randfahrt. Sie erreichen Ecken zuverlässiger, steigen sicher Wände hoch und reinigen auch die Wasserlinie, an der sich oft Kalkränder bilden.
Ebenso wichtig ist das Zusammenspiel von Fördermenge und Filtertechnik:
- Grobeinsätze fangen Blätter und Nadeln
- Feinsiebe halten Staub und Sand zurück
- Mikroeinsätze (bis ca. 3 µm) filtern Pollen und Algen
- Ohne den passenden Filter bringt auch eine hohe Literleistung pro Stunde wenig.
Praxistaugliche Details erhöhen den Komfort: Eine Bodenklappe am Filterkorb zum schnellen Ausspülen, eine zuverlässige Rückkehr- und Parkfunktion an der Wasserlinie, ein Skimmer- oder Oberflächenmodus bei viel Pollen oder Laub sowie eine robuste App mit Zeitplänen und Protokollen.
Wer besonderen Wert auf Komfort legt, achtet zudem auf kabelloses Laden (weniger Fummelei) und eine lange Ersatzteilversorgung.
Muss ich den Poolroboter nach jedem Einsatz reinigen?
Ja – das zahlt direkt auf Leistung und Lebensdauer ein. Nach jedem Lauf gehört der Filter in die Hand: Korb entleeren, gründlich mit dem Schlauch ausspülen, Feinsiebe von innen nach außen durchspülen, damit sich Partikel nicht festsetzen. Ein sauberer Filter senkt den Strömungswiderstand, erhöht die Sogkraft und verbessert die Haftung an Wänden. Danach kurz das Gehäuse abbrausen, Haare oder Fasern aus der Ansaugöffnung und den Rollen entfernen und die Dichtungen sichten.
Wer einen Mikroeinsatz nutzt, reinigt öfter: Feinsiebe setzen sich schneller zu – im Zweifel lohnt ein zweiter, trockener Filterkorb als Wechsel-Set, damit der Roboter sofort wieder einsatzbereit ist und die Reinigung nicht am nassen Sieb scheitert. Trocknen im Schatten schont Kunststoffe und Dichtungen; direktes Sonnenlicht lässt Materialien altern.
Beim Laden gilt: Kontakte sauber halten, Station spritzwassergeschützt stellen und die Lüftungsschlitze frei halten. Diese fünf Minuten Pflege nach jedem Einsatz verhindern Geruch, sichern die Saugleistung und schonen den Akku, weil der Roboter nicht gegen einen zugesetzten Filter ankämpfen muss.

Wie oft sollte ich den Roboter laufen lassen?
Die Einsatzfrequenz hängt von Eintrag und Nutzung ab. In der Poolsaison reicht in vielen Gärten ein Rhythmus von täglich bis alle zwei bis drei Tage. Bei starkem Pollenflug, viel Laub, nach Gewittern oder Poolpartys lohnt sich ein zusätzlicher Durchgang – am besten als Vollzyklus inklusive Wände und Wasserlinie, damit sich Schmutz nicht festsetzt. Zwischen den Vollzyklen halten Eco- oder Erhaltungsmodi den Boden sauber und sparen zugleich Zeit und Akku.
Zum Saisonstart empfiehlt sich ein „Clean Slate“: Groben Schmutz manuell entfernen, Wasserwerte stabilisieren und mit sauberem Filter beginnen – dann arbeiten die Programme deutlich effektiver. Wer Zeitpläne nutzt, sollte Reinigungen direkt nach Phasen mit hohem Eintrag einplanen, etwa morgens nach einer windigen Nacht.
In Ferienphasen oder bei Dauerbetrieb bleiben viele Geräte mehrere Tage im Becken. Trotzdem gilt: Filter regelmäßig leeren, Akku laden und Dichtungen kurz prüfen. Bei Schockchlorung, sehr hoher Wassertemperatur oder stark abweichenden pH-Werten besser eine Pause einlegen, bis die Wasserwerte wieder stabil sind – das schont Lager, Elektronik und Gummiteile. Der ideale Rhythmus: Regelmäßige leichte Läufe zur Pflege, kombiniert mit strategischen Vollzyklen für die Grundhygiene – so reduziert sich die Handarbeit mit Kescher und Bürsten deutlich.
Skimmer-Modus: Wann lohnt er sich?
Bei viel Oberflächeneintrag: Pollenflüge, Laubfall, Insekten, Sonnenöl nach Badetagen – all das sammelt sich zunächst oben. Ein Oberflächen- bzw. Skimmer-Modus fängt diese Partikel ab, bevor sie absinken und den Hauptfilter belasten. Das senkt die Nacharbeit am Skimmerkorb, hält die Wasserlinie sauberer und reduziert den Gesamtschmutz.
Besonders sinnvoll ist der Modus in windigen Lagen und bei Pools in der Nähe von Bäumen. Ideal: Oberflächenreinigung kurz nach starkem Eintrag (morgens nach einer windigen Nacht oder direkt nach dem Badebetrieb) einplanen und mit regulären Boden-/Wandläufen kombinieren.
Darf der Roboter im Wasser bleiben?
Viele Poolroboter unterstützen Zeitpläne über mehrere Tage und können in dieser Zeit im Becken bleiben. Eine Routine mit regelmäßiger Pflege ist dennoch sinnvoll, um die Langlebigkeit des Roboters zu gewährleisten:
- Filter regelmäßig leeren und ausspülen
- Akku nachladen
- Dichtungen kurz prüfen
Bei Gewitter, Starkregen, Frost oder Schockchlorung den Roboter besser herausnehmen, abspülen, im Schatten trocknen und frostfrei lagern. Für die Winterpause empfehlen sich 40–60 Prozent Akkuladung, ein sauberer, trockener Filter und trockene Lagerung – so bleiben Akku, Dichtungen und Elektronik lange funktionsfähig.

Wie lange hält ein Akku beim Poolroboter?
Die Akkulaufzeit hängt vom Modell, der Reinigungsleistung und den gewählten Programmen ab. Die meisten kabellosen Poolroboter arbeiten zwischen 60 und 180 Minuten pro Ladung. Für kleine bis mittelgroße Becken reicht oft schon eine Stunde, leistungsstarke Modelle schaffen auch komplexe Becken in einem Durchgang.
Wird zusätzlich die Wasserlinie oder der Skimmermodus genutzt, verkürzt sich die Laufzeit etwas. Nach dem Zyklus muss der Akku geladen werden – je nach Gerät dauert das 2 bis 5 Stunden. Hochwertige Modelle mit größerem Akku oder Energiesparmodus können auch längere Einsätze abdecken.
App oder „ohne alles“?
Das hängt vom Becken und vom Anspruch ab. App-Modelle punkten mit Zeitplänen, Protokollen, Firmware-Updates und oft smarterer Navigation (S-/N-Bahnen, Randfahrt, teils Kartierung). Sie automatisieren die Pflege und sparen über die Saison spürbar Zeit. In kleinen, runden Becken reicht ein einfacher Bodenreiniger ohne App häufig aus – Start per Knopf, Korb leeren, fertig.
Wer jedoch ein großes, rechteckiges oder komplexes Becken betreibt, profitiert klar von einer App mit planbaren Läufen, angepassten Modi (Multizonen- oder Skimmer-Modus) und sauberer Dokumentation. Kurz: „Ohne alles“ für einfache Pools, App-Komfort für anspruchsvollere Szenarien.
Fazit
Wer die Poolpflege entspannt halten will, kommt an einem guten Poolroboter kaum vorbei. Handarbeit mit Kescher und Bürsten ist zwar billig, kostet aber Zeit – besonders bei viel Laub, Pollen oder häufiger Nutzung. Roboter übernehmen die Grundreinigung zuverlässig und halten die Wasserqualität und Optik stabil. Einfache Bodenreiniger sind der unkomplizierte Einstieg; Modelle mit Wand- und Wasserlinienreinigung, Skimmer- oder Multizonen-Modus reduzieren die Nacharbeit deutlich.
Testsieger ist der Aiper Scuba X1 Pro Max dank starker Leistung, kompletter Abdeckung und guter Sensorik. Preis-Leistungs-Sieger ist der Dreame Z1 Pro: schnell, systematisch, mit Wasserlinien- und Spotreinigung sowie Rückruf zur Oberfläche. Preisbewusste greifen zum Wybot C2 Vision mit Kameranavigation, der Aiper Scuba X1 ist ein solider Allrounder mit kabelloser Ladestation, und der Beatbot Aquasense 2 Ultra punktet mit Smart-Sensoren und Klärmittel-Kartusche, ist jedoch teuer.
Entscheidend ist die Passform zum Becken: Kleine, runde Pools kommen mit einfachen Bodenreinigern aus, große oder komplexe Becken profitieren von planvoller Navigation, Wasserlinienfahrt, Multizonen-Programmen und abgestuften Filtern. Komfortfunktionen wie Rückkehrposition, kabelloses Laden, App-Steuerung, Wartungsfreundlichkeit und eine gesicherte Ersatzteilversorgung sorgen für langfristige Zufriedenheit – und mehr Zeit im Wasser als mit dem Kescher.
Weitere Artikel zu sommerlichen Themen:
Testsieger
Aiper Scuba X1 Pro Max
Der Poolroboter Aiper Scuba X1 Pro Max hat einen stärkeren Motor und eine verbesserte Navigation als das Basismodell. Ob sich das Upgrade lohnt, zeigt der Test.
- hervorragende Reinigungsleistung
- Filter leicht zu reinigen
- Rückkehr-Funktion
- Unterwassersteuerung nur gegen Aufpreis
- teuer
- Filterwechsel etwas schwierig
Aiper Scuba X1 Pro Max im Test: Premium-Poolroboter mit 9 Motoren & 40 Sensoren
Der Poolroboter Aiper Scuba X1 Pro Max hat einen stärkeren Motor und eine verbesserte Navigation als das Basismodell. Ob sich das Upgrade lohnt, zeigt der Test.
Der Aiper Scuba X1 Pro Max stellt ein Upgrade des Basismodells dar und bietet eine stärkere Motorleistung und eine verbesserte Navigation. Das Modell richtet sich daher primär an Poolbesitzer mit größeren oder komplexeren Becken. Dank erweiterter Sensorik orientiert sich der Scuba X1 Pro Max präzise im Wasser und reinigt sowohl Boden als auch Wände systematisch. Er ist zwar nicht günstig, allerdings preiswerter als andere Premium-Modelle. Wir fühlen dem Scuba X1 Pro Max im Test auf den Zahn und prüfen, ob sich das Upgrade lohnt. Das Testgerät hat uns der Hersteller zur Verfügung gestellt.
Design & Verarbeitung
Auf den schnellen ersten Blick ist der Aiper Scuba X1 Pro Max kaum vom kleineren X1 zu unterscheiden. Stellt man beide Modelle nebeneinander, fällt hauptsächlich der Größenunterschied auf. Der X1 Pro Max nutzt einen ähnlichen Kettenantrieb, ist aber deutlich höher. Das ist notwendig, denn im Gehäuse sind neun statt vier Motoren und 40 statt 16 Sensoren verbaut. Die gesteigerte Motorisierung und Sensorik bringen Vorteile, auf die wir weiter unten noch eingehen. Mit 15,1 Kilogramm zählt der X1 Pro Max zu den schwersten Poolrobotern am Markt.
Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder

Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder

Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder

Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder

Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder

Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder

Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder

Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder

Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder

Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder
Aiper Scuba X1 Pro Max – Bilder

Aiper hält den X1 Pro Max in klassisch dunklen Farben wie Anthrazit mit schwarzer Oberseite. Der hintere Griff ist in Carbon-Optik gehalten und trägt den Schriftzug Scuba X1 Pro Max. Oberhalb davon befindet sich ein kleines Bedienfeld.
Lieferumfang & Installation
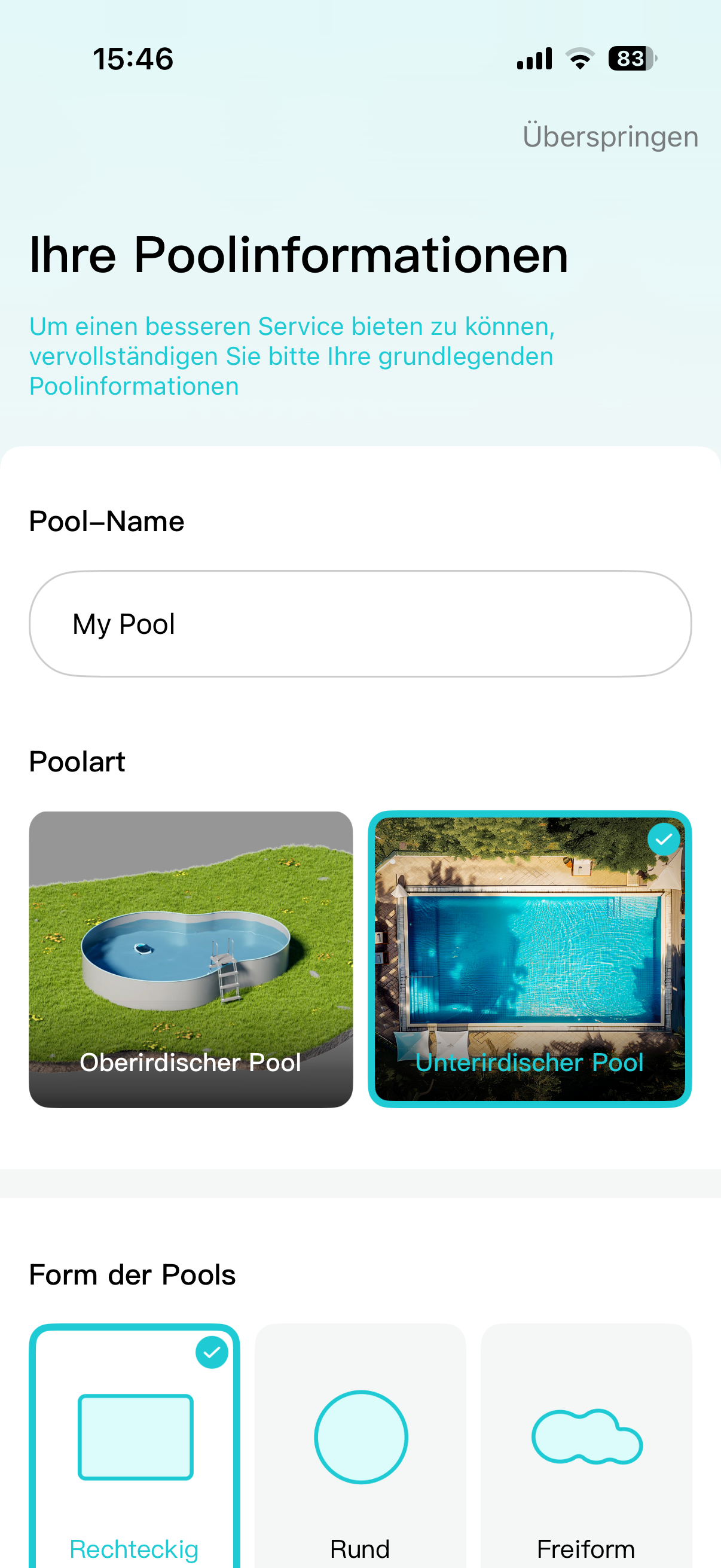
Die Inbetriebnahme des Aiper Scuba X1 Pro Max erfolgt mit wenig Aufwand, wie man es bei modernen Poolrobotern erwartet. Nach dem Auspacken lädt man den Akku des Roboters und aktualisiert die Firmware per App. Danach wählt man den passenden Reinigungsmodus aus und die Reinigung kann starten.
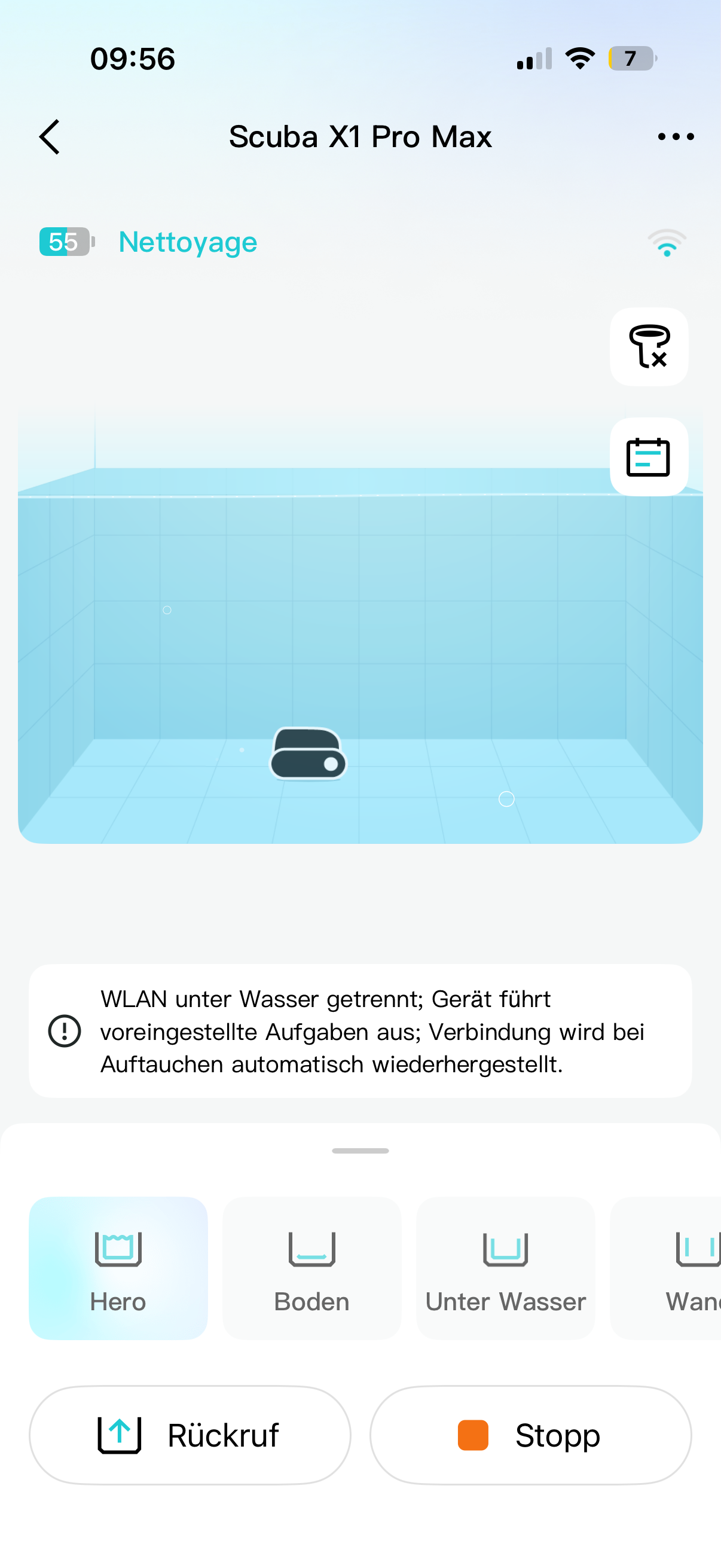
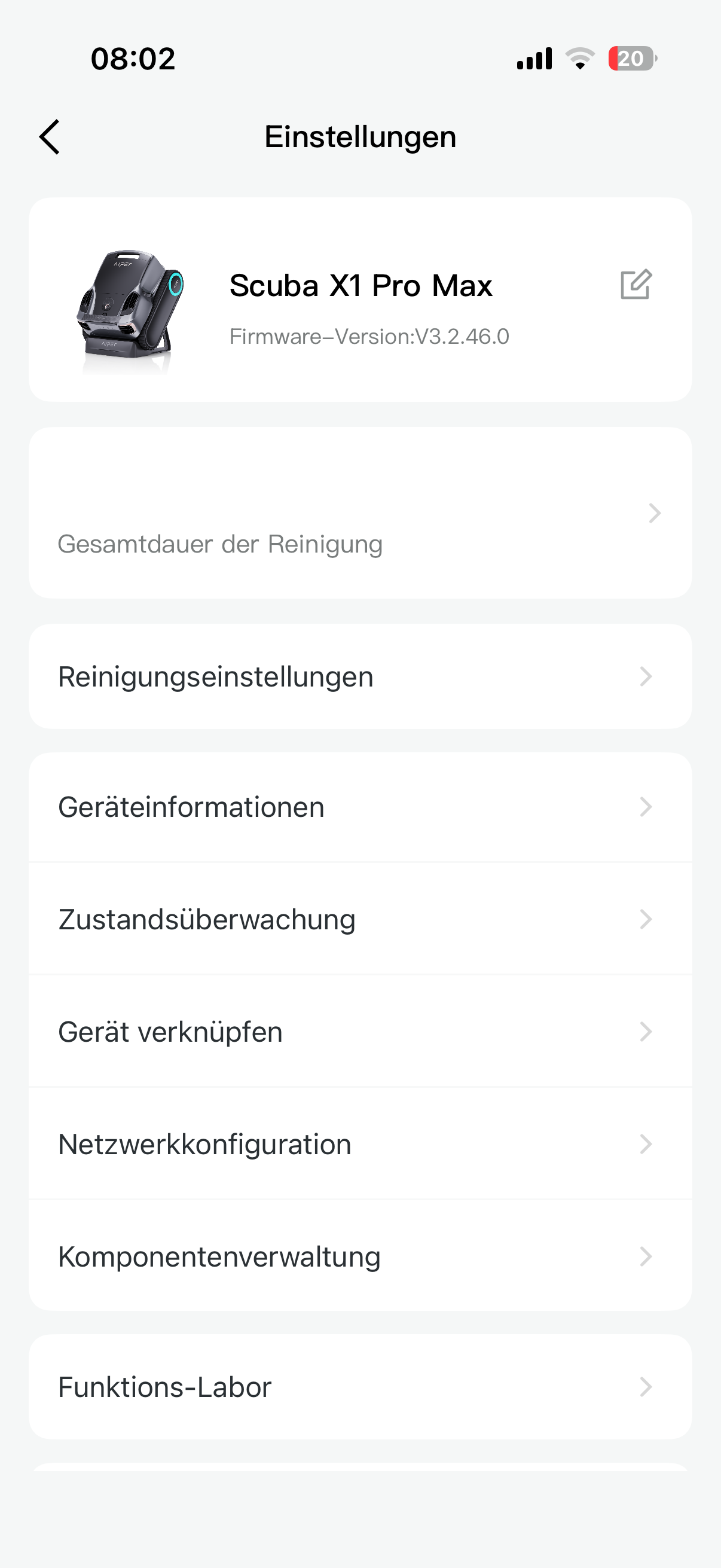
Zur Steuerung und Konfiguration steht die Aiper-App zur Verfügung, die eine einfache Verbindung mit dem heimischen WLAN herstellt. Zwar kappt die Verbindung unter Wasser, doch an Land ermöglicht die App umfassende Einstellungen, Firmware-Updates und das Einsehen von Reinigungsprotokollen.
Bedienung & Steuerung
Im Gegensatz zum ähnlich positionierten Dreame Z1 Pro wird der Aiper X1 Pro Max ohne Fernbedienung geliefert. Eine Steuerung unter Wasser ist daher nicht möglich. Für etwa 300 Euro bietet Aiper das Hydrocomm Pure an, mit dem sich Modiwechsel vornehmen und der Akkustand ablesen lassen. Zukünftig sollen teurere Varianten auch die Wassertemperatur und pH-Wert erfassen. Über die Hydrocomm-Boje kann man den Poolroboter außerdem zur Wasseroberfläche zurückrufen, was die Entnahme erleichtert. Ohne dieses Zubehör ist eine manuelle Bergung per Haken erforderlich.
Die Bedienung erfolgt hauptsächlich über Tasten auf der Geräteoberseite: Ein- und Ausschalter, Moduswahltaste sowie eine Taste zur Leistungsstufen-Auswahl (Automatisch, Eco, Max). Alternativ steht die Steuerung über die App zur Verfügung.
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App

Aiper Scuba X1 Pro Max – Bilder App
Aiper Scuba X1 Pro Max – Bilder App
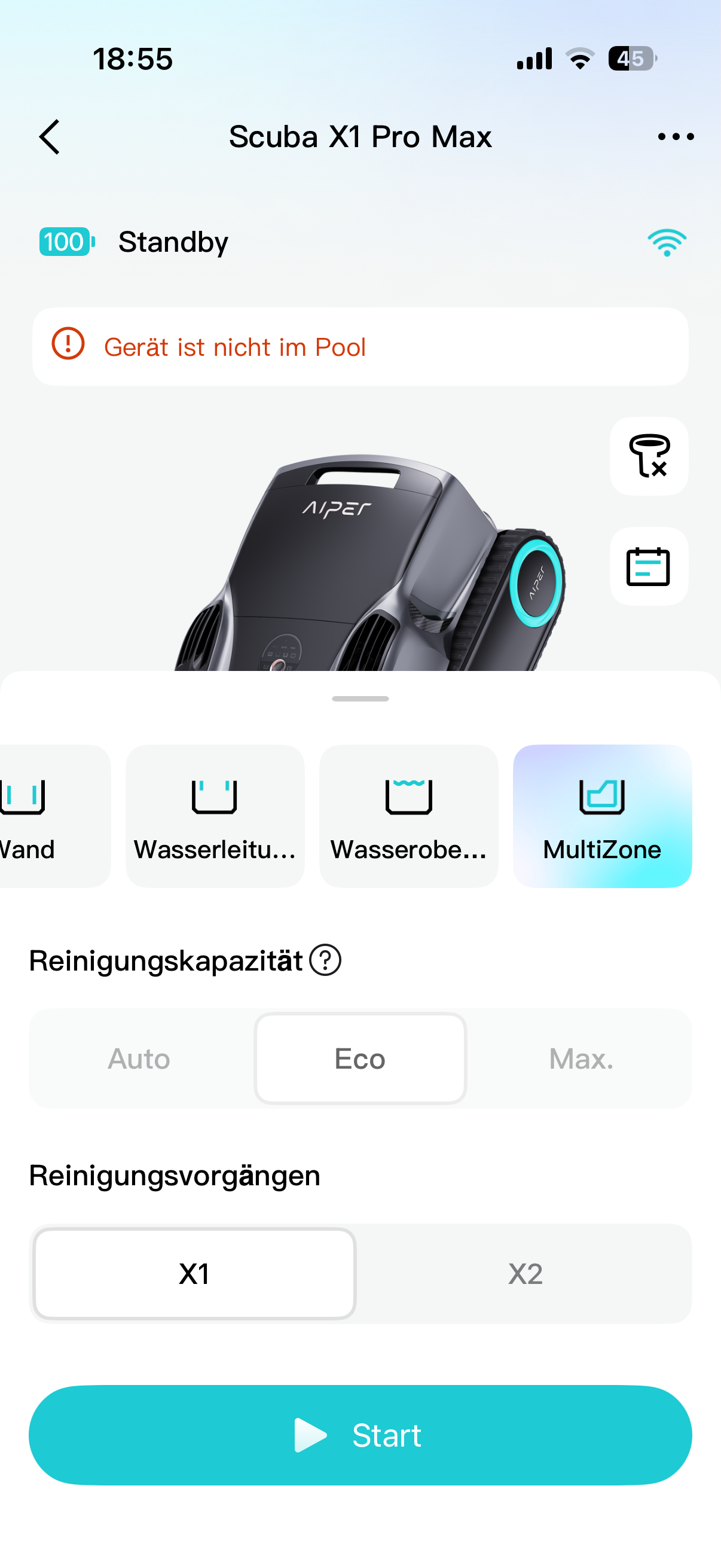
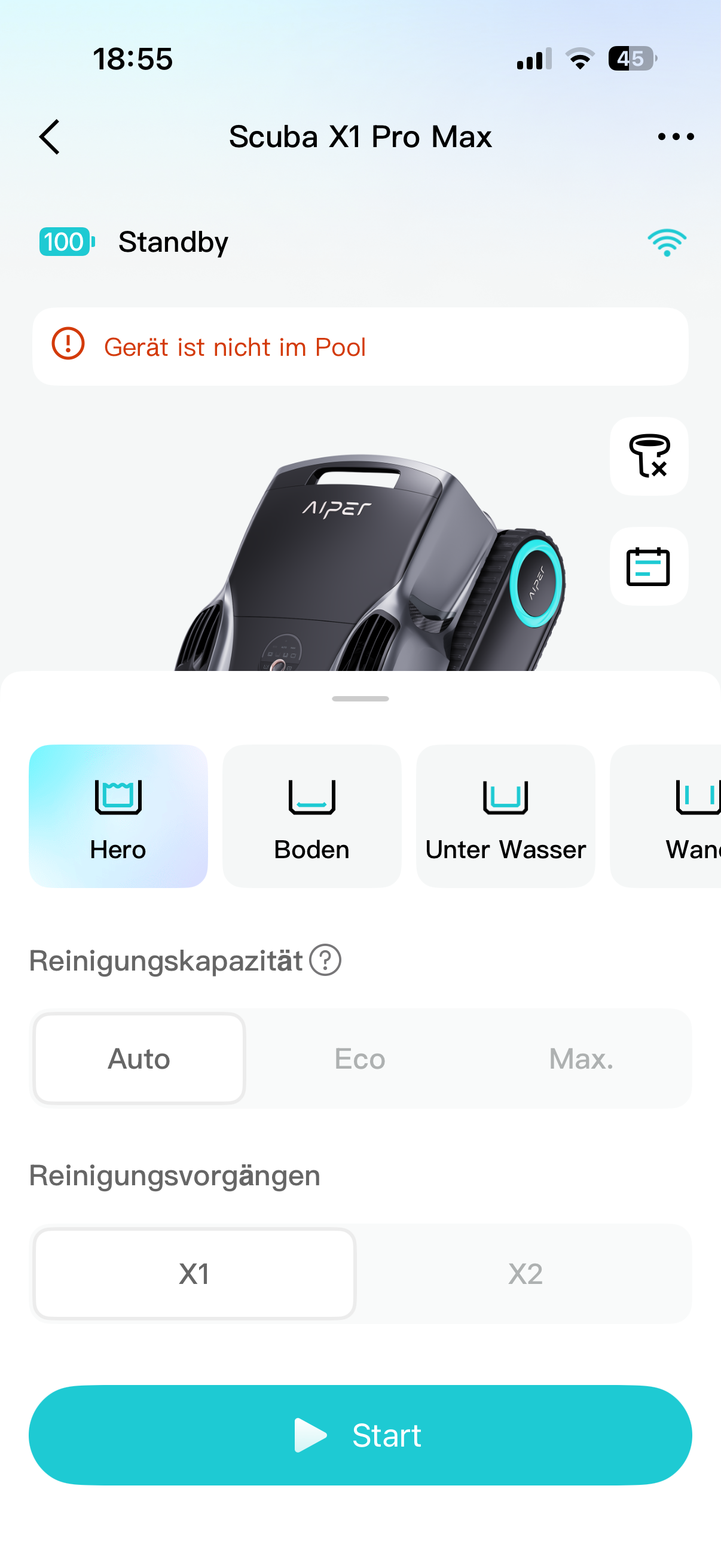
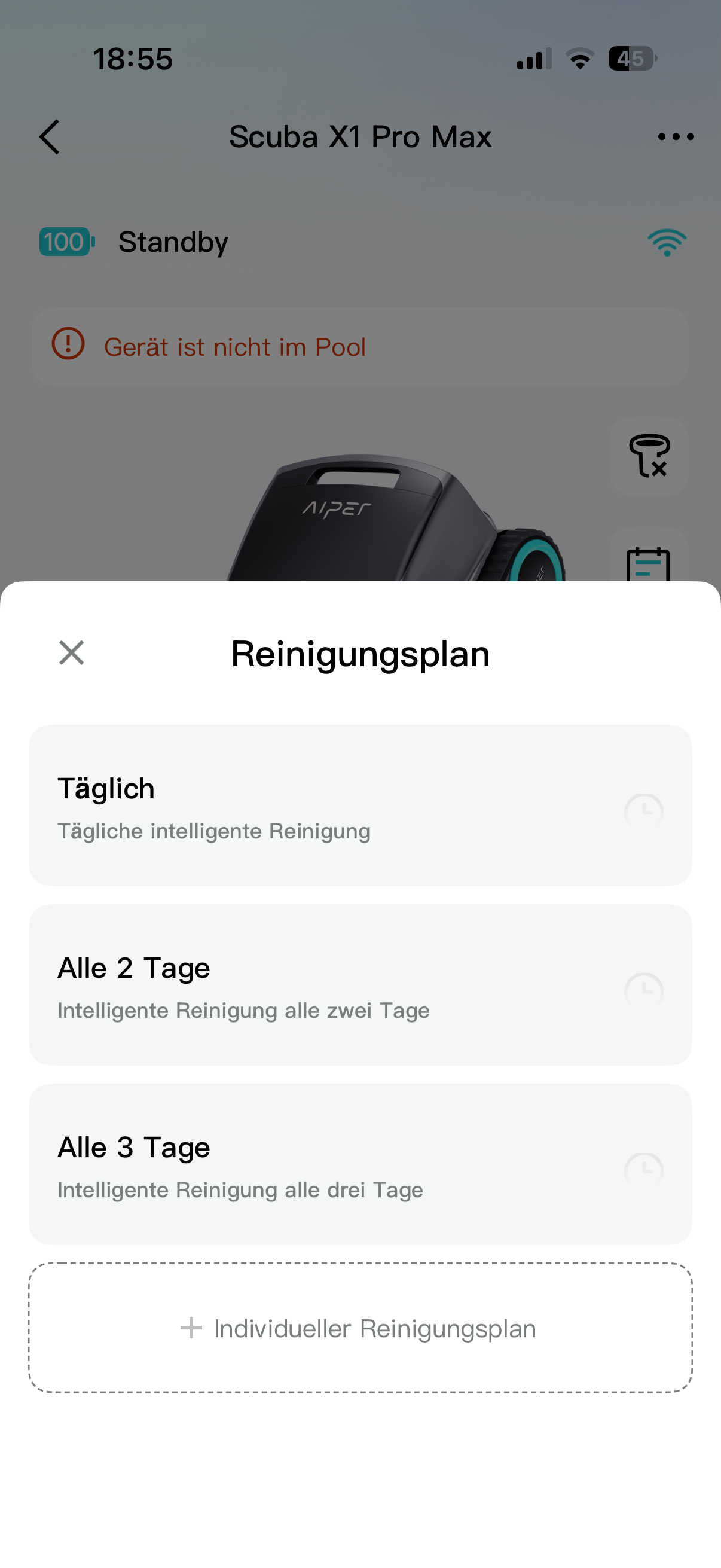
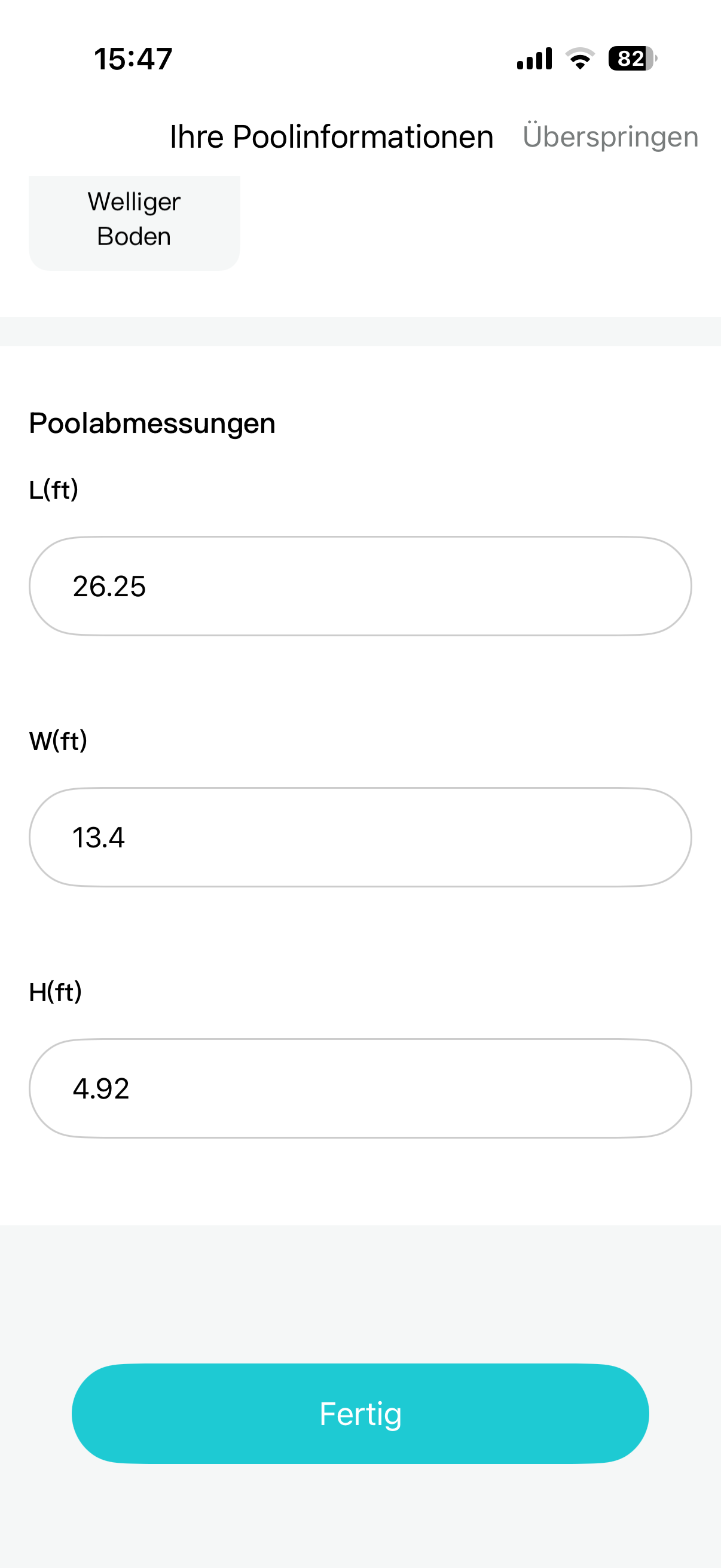
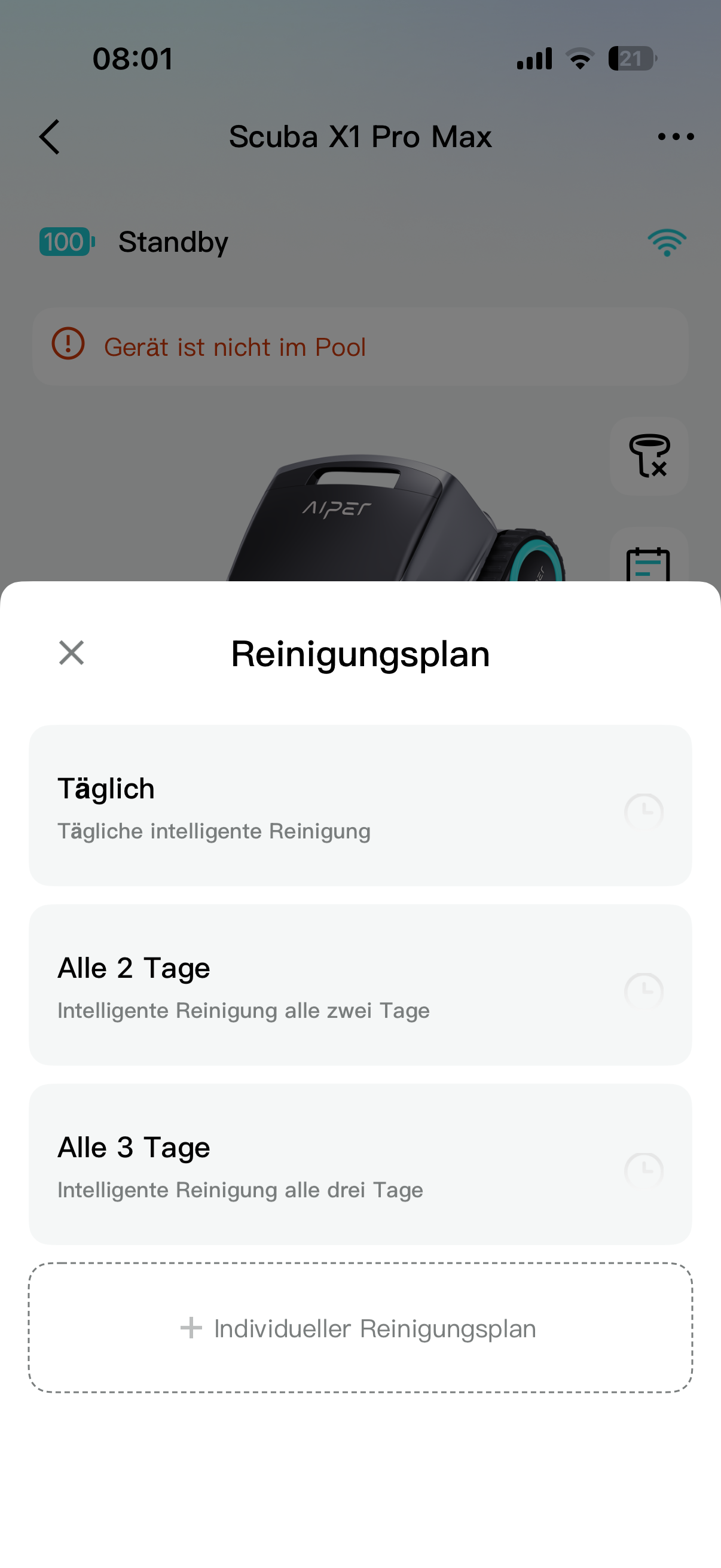
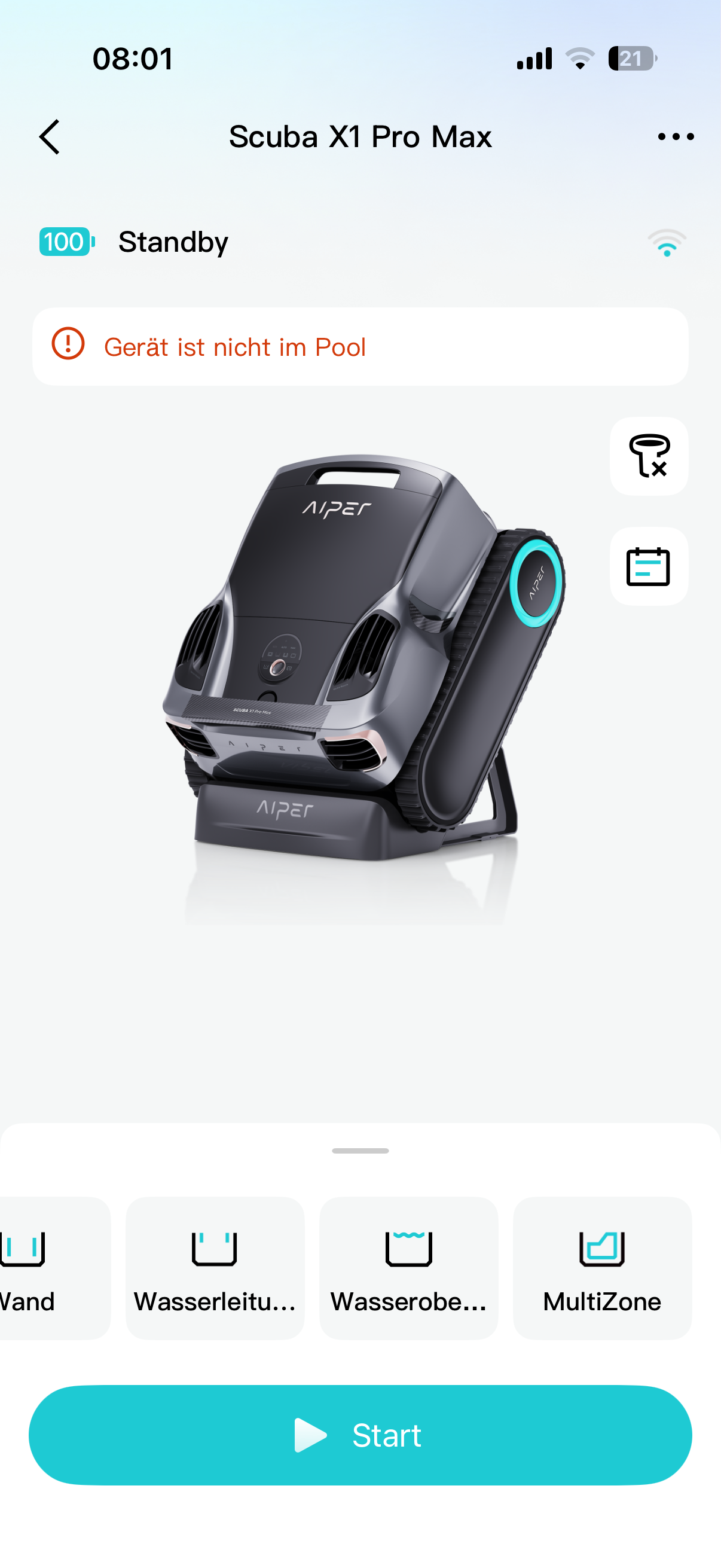
Wie der kleine Bruder verfügt auch der X1 Pro Max über die vier grundlegenden Reinigungsmodi: Boden, Wand, Wasserlinie und Smart (Komplettreinigung). Zeitpläne erlauben, dass der Roboter mehrere Tage im Wasser bleibt und automatisch reinigt, bis der Akku leer ist. Die Intervalle sind einstellbar auf täglich, alle zwei oder alle drei Tage.
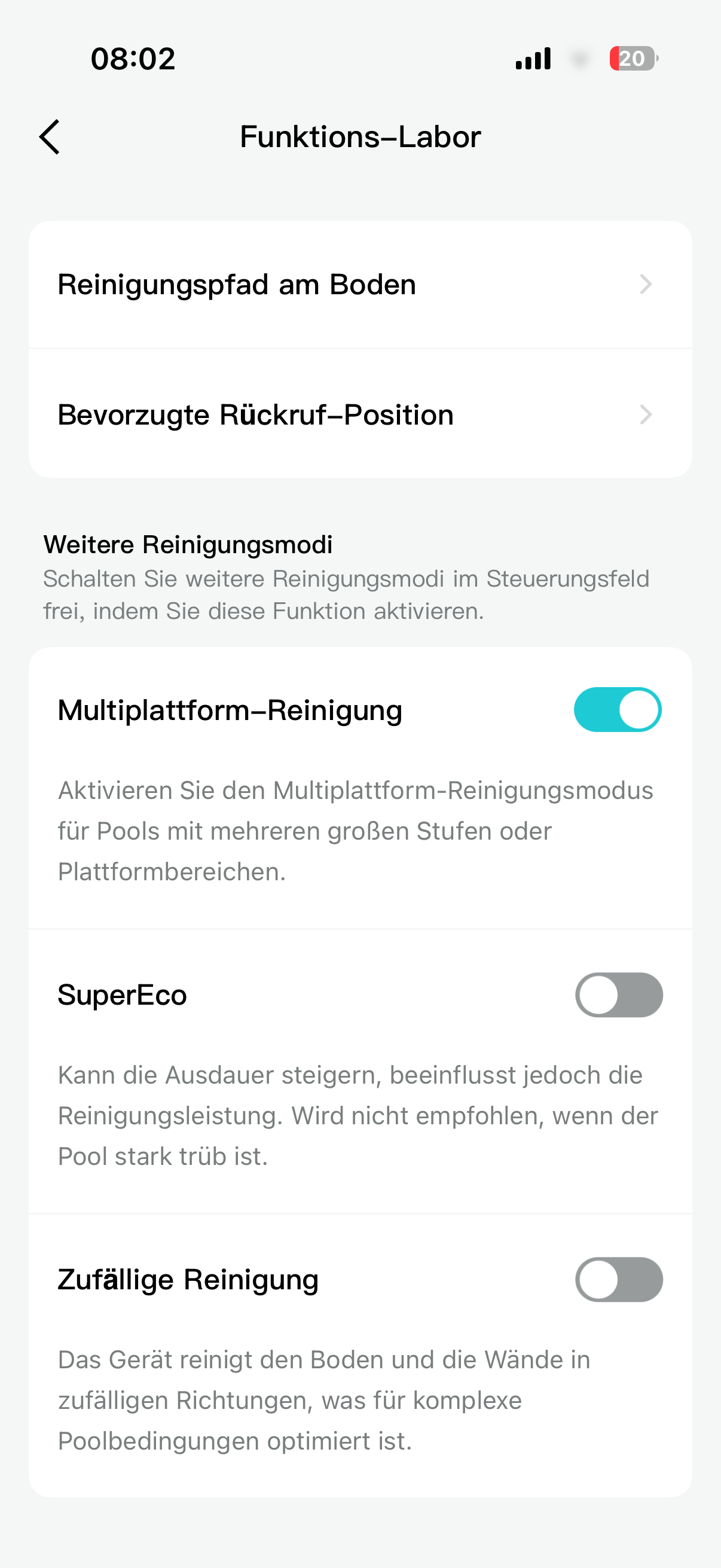
Zudem bietet der X1 Pro Max zwei zusätzliche Modi: einen Skimmer-Modus zum Absaugen der Wasseroberfläche und einen Multizonen-Modus, der bei unterschiedlich tiefen Pools sinnvoll ist. Bei Bedarf konfiguriert man auch die Häufigkeit der Reinigungsvorgänge und wählt zwischen einer einmaligen oder einer doppelten Reinigung.
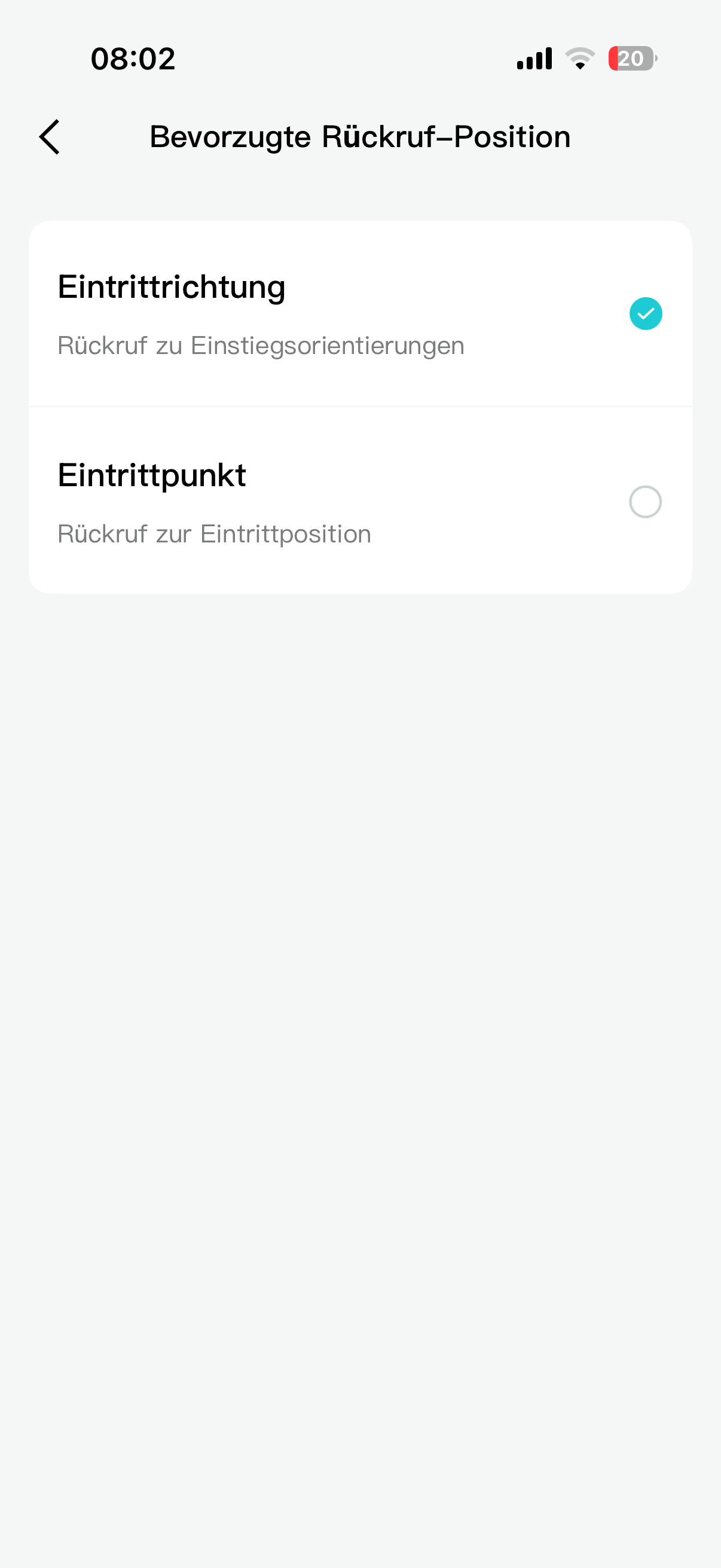
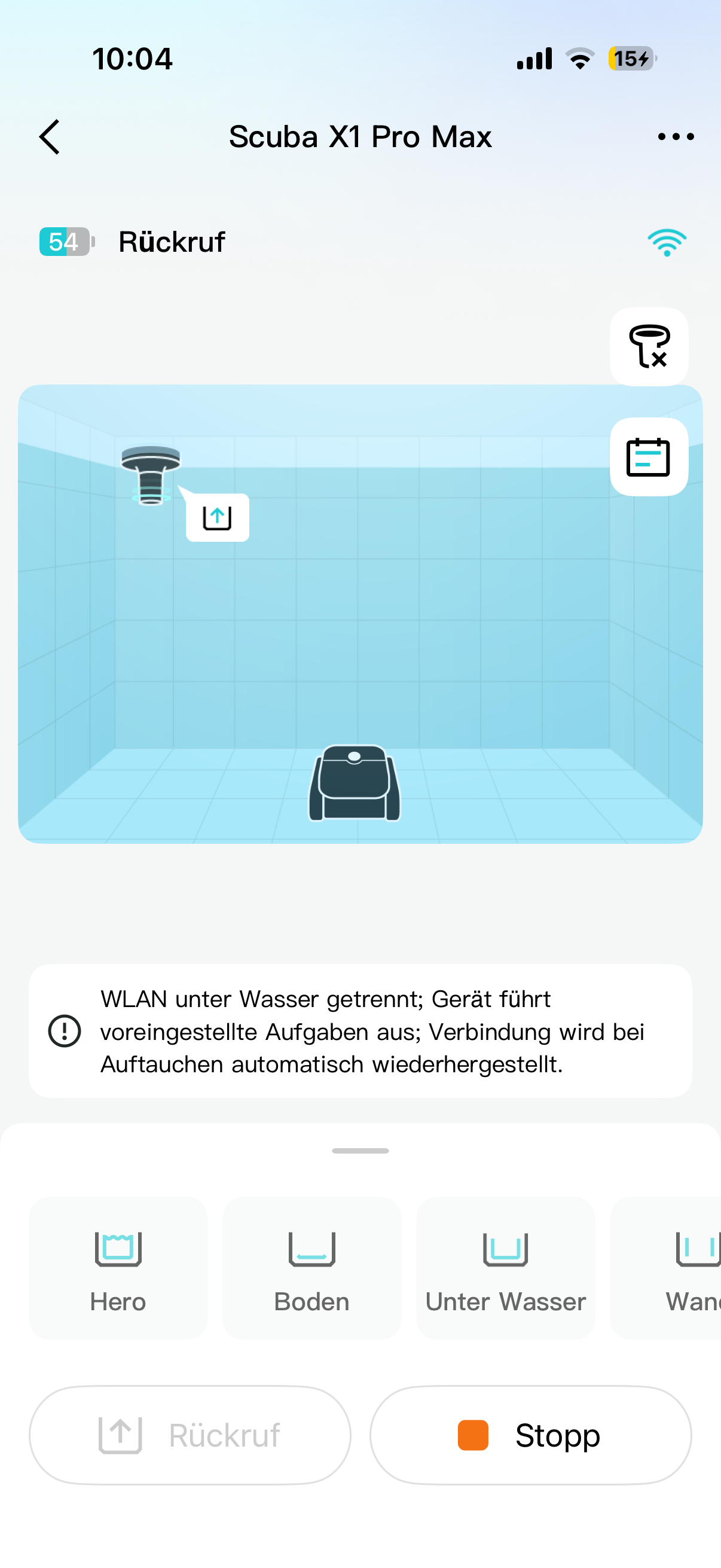
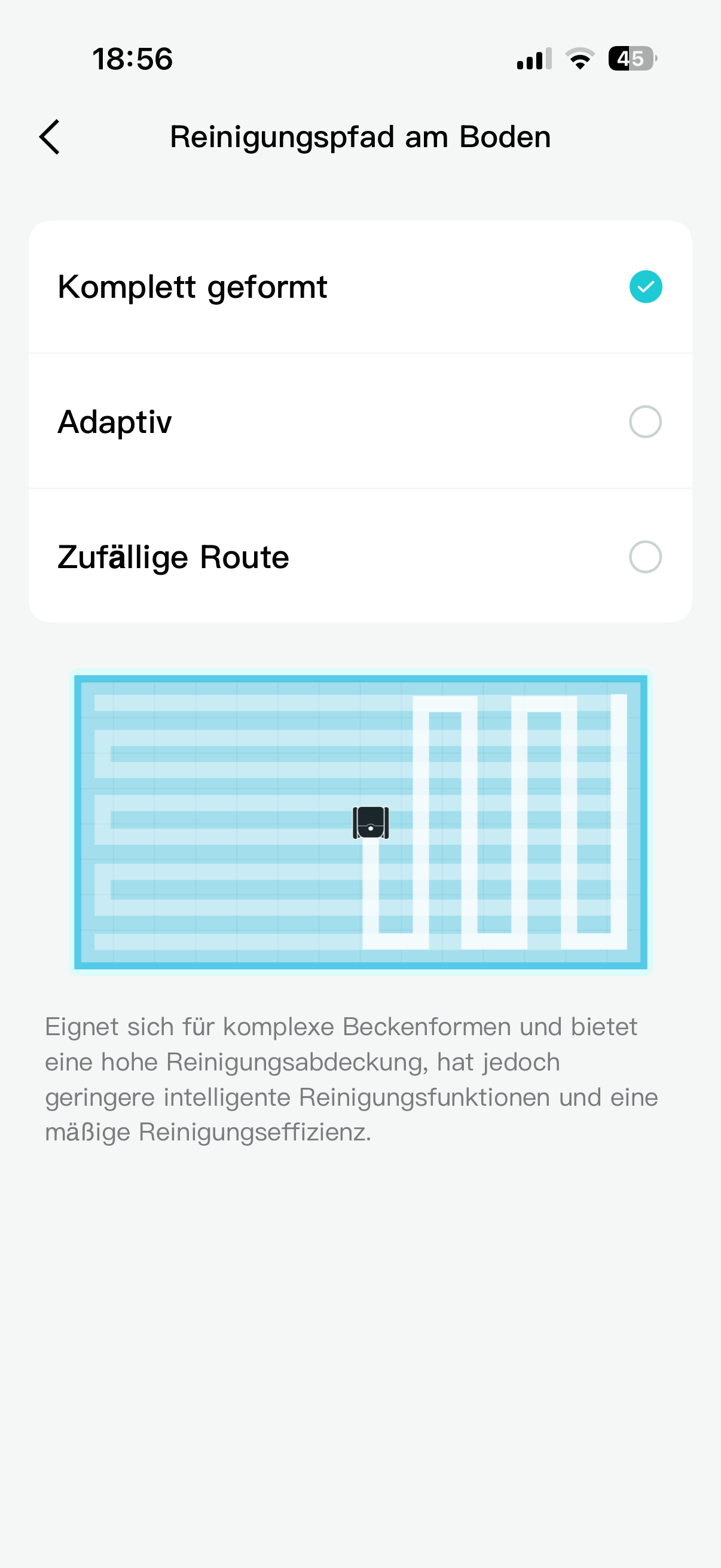
Besonders praktisch ist die Rückruf-Funktion, mit der der Roboter selbstständig zur Stelle zurückkehrt, an der er zu Wasser gelassen wurde. Die Reinigungsroute kann man in der App individuell festlegen; eine zufällige Route ist ebenfalls möglich, wird aber nicht empfohlen – der Roboter übersieht so eventuell Bereiche im Pool.
Navigation & Reinigung
Der Aiper Scuba X1 Pro Max verfügt über neun Motoren und 40 Sensoren. Laut Aiper ermöglicht dies eine 360-Grad-Kartierung. In der App erscheint zunächst keine Karte angezeigt, wie man das von Staubsaugerrobotern kennt. Allerdings kann man sowohl die Karte als auch den Reinigungsvorgang später im Protokoll einsehen. Die Scan-Technologie hilft zudem, Schmutz zu erkennen und gezielt zu beseitigen. Damit arbeitet der X1 Pro Max im Vergleich zum kleineren Bruder deutlich intelligenter bei der Reinigung.
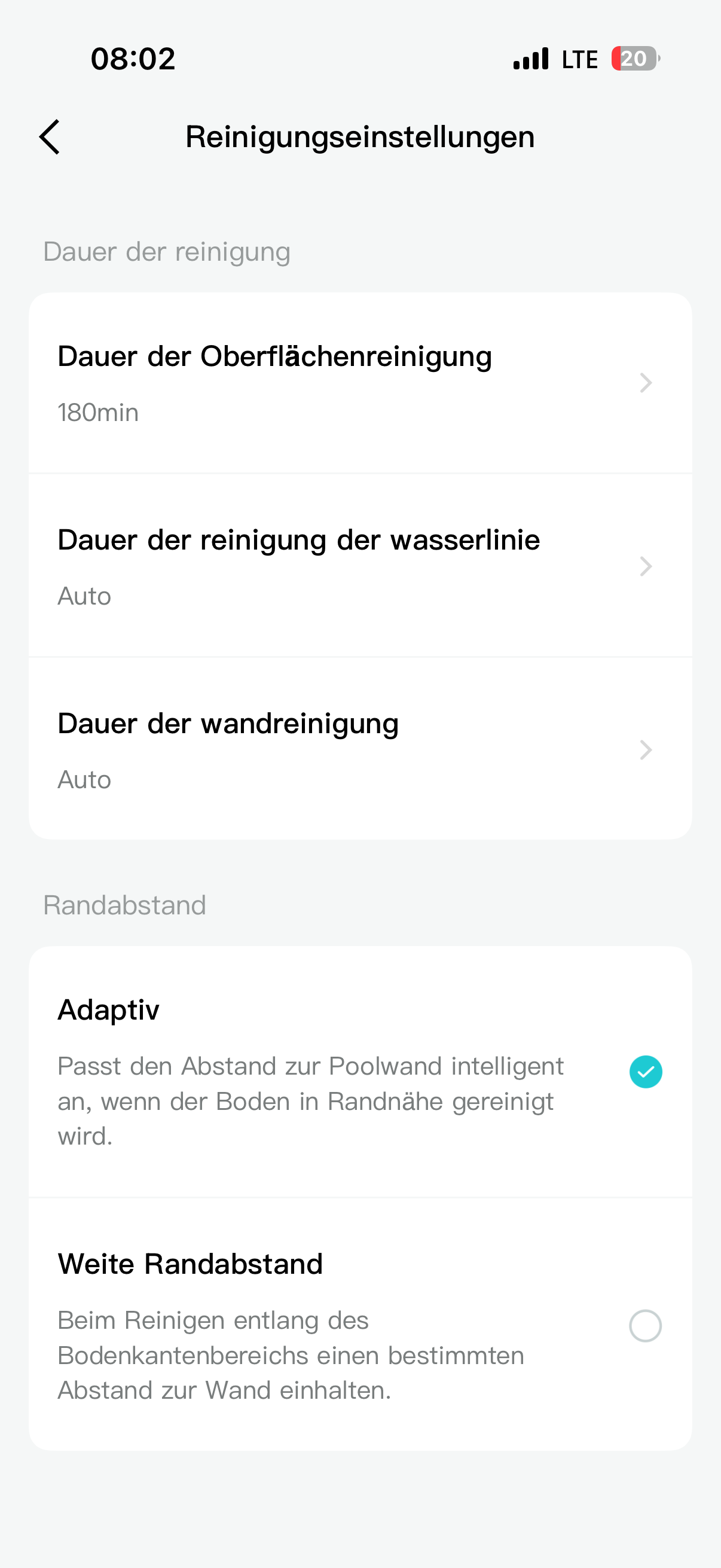
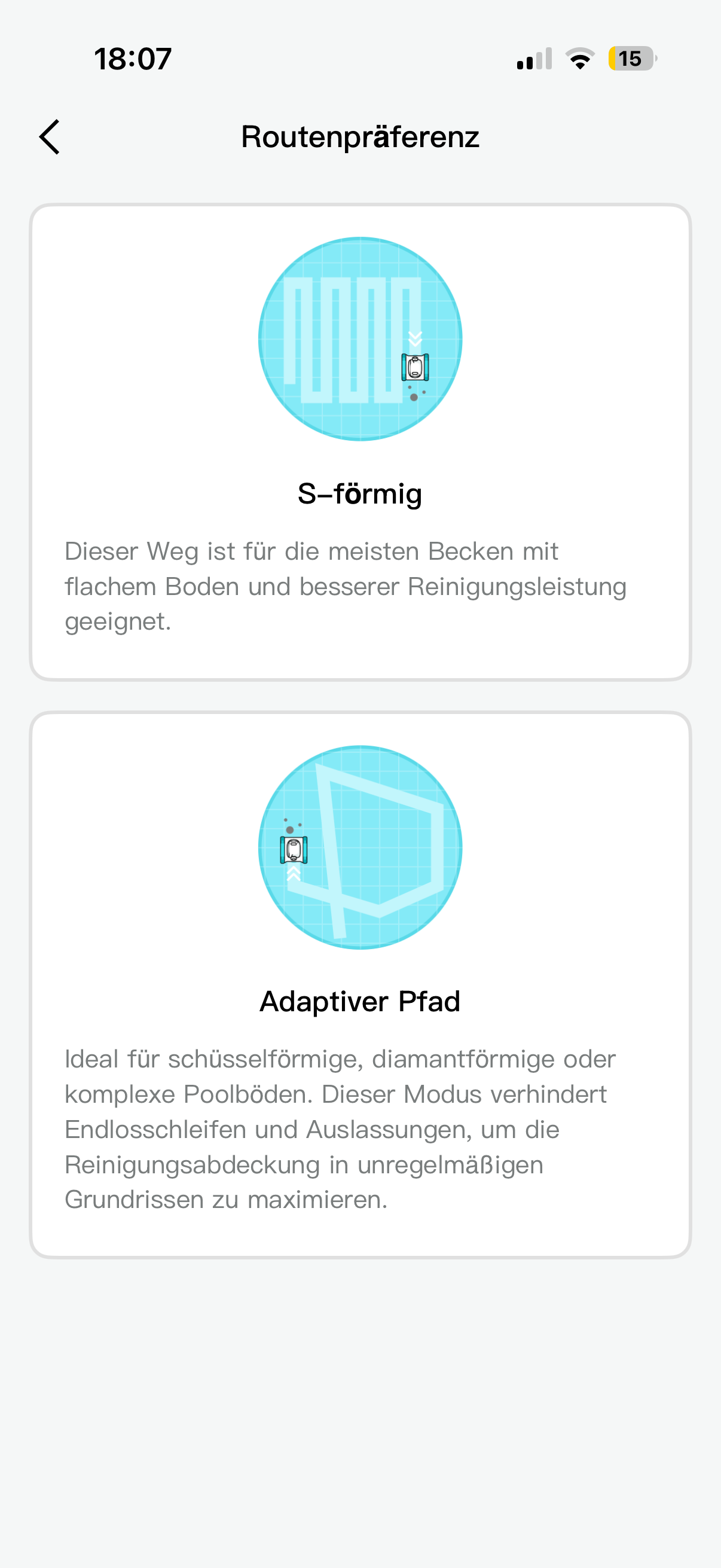
Hierfür fährt der Roboter zunächst die Bodenränder ab und arbeitet dann in einem s-förmigen Pfad. Die Kanten reinigt er sehr gründlich, da er sie mehrfach abfährt. Ein adaptiver oder zufälliger Pfad ist in der App wählbar, aber wenig sinnvoll. Danach folgen die Wände bis über die Wasserlinie. Während der Auf- und Abfahrt reinigt er die Kanten erneut.
Auch mit größerem Schmutz wie Blättern oder Pflanzenteilen hat der Aiper Scuba X1 Pro Max keinerlei Probleme. Mit einer maximalen Saugleistung von bis zu 32.000 Litern Wasser pro Stunde zählt er zu den stärksten Modellen am Markt und schafft rund 7000 Liter mehr als der kleinere Scuba X1.
Der Filterkorb bietet austauschbare Außenwände mit 3 und 180 Mikrometer Feinheit, die man einfach einklickt. Der Wechsel ist jedoch etwas schwergängig und könnte zur Materialermüdung führen. Die Reinigung des Filters wird durch eine Bodenklappe erleichtert, die sich einfach öffnen lässt.
Akku: Wie lange hält der Aiper Scuba X1 Pro Max durch?
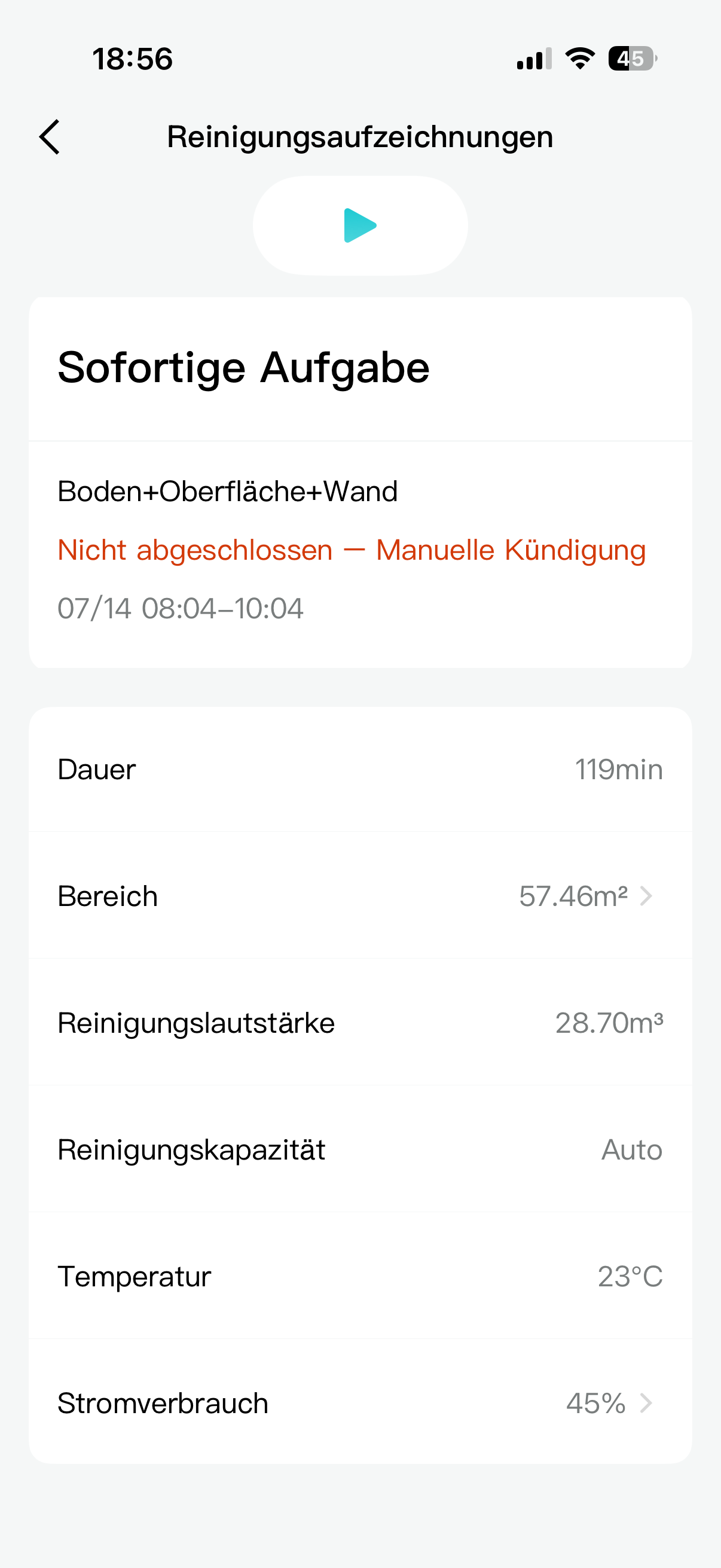
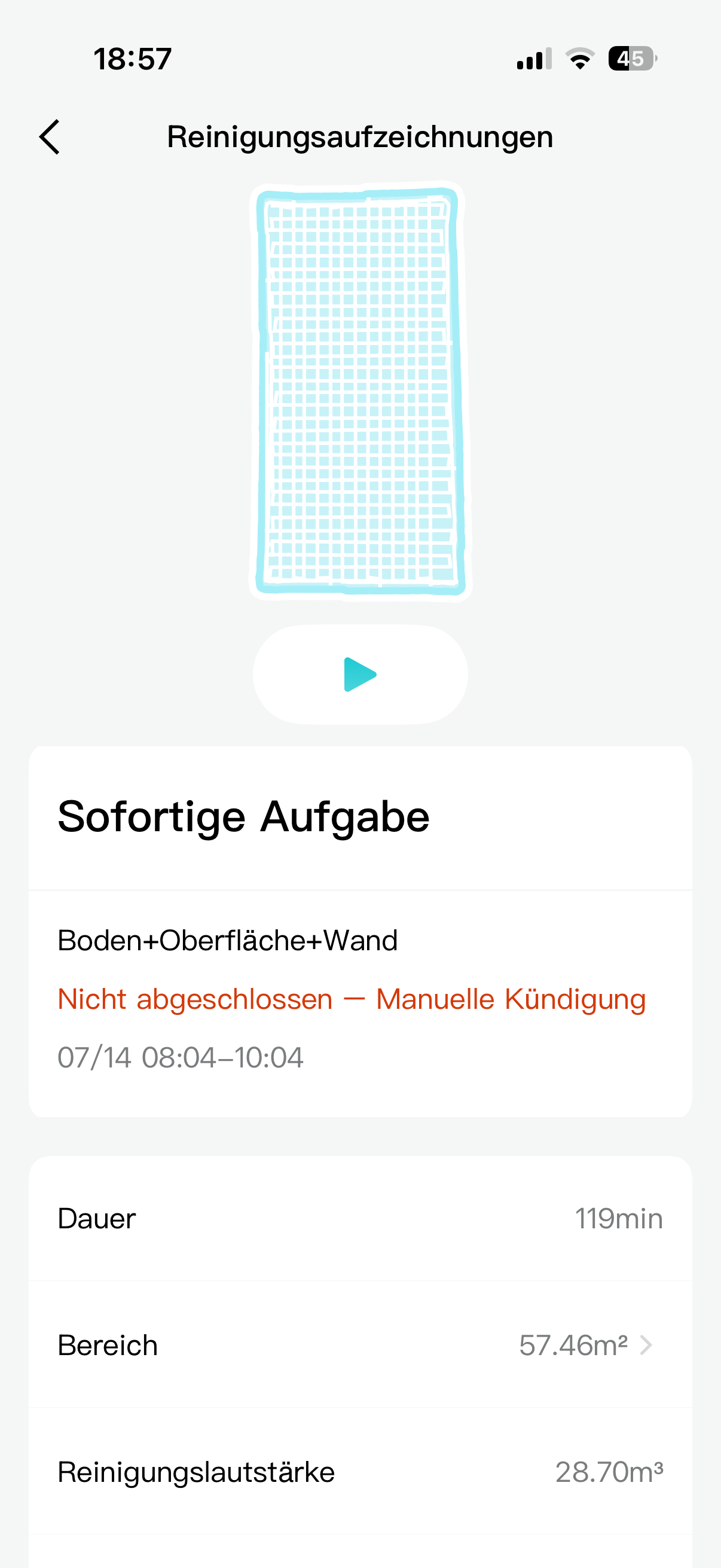
Die Akkulaufzeit hängt vom gewählten Reinigungsmodus ab. Im Eco-Modus kann der Roboter bis zu einer Woche im Wasser bleiben, wenn er nach Zeitplan arbeitet. Eine Komplettreinigung mit Wänden, Wasserlinie und Wasseroberfläche beansprucht etwa fünf Stunden Akku. Im Test reinigt der X1 Pro Max ein Becken mit 48 Kubikmetern Wasser in 119 Minuten und verbraucht dabei 45 Prozent Akku. Der Akku lädt drahtlos in der mitgelieferten Ladestation.
Praxiserfahrung & Alltagstauglichkeit
Im Vergleich zum deutlich teureren Beatbot Aquasense 2 Ultra zeigt der Aiper Scuba X1 Pro Max nur wenige Unterschiede. Besonders bei der Reinigungsleistung steht er dem Beatbot kaum nach, obwohl er keine Seitenbürsten besitzt. Die gründliche Reinigung von Kanten und Ecken überrascht uns positiv.
Das Gewicht von 15 Kilogramm sollte man beim Hantieren nicht unterschätzen, vor allem beim Herausnehmen aus dem Wasser.
Preis: Was kostet der Aiper Scuba X1 Pro?
Aiper bepreist den Scuba X1 Pro Max mit 2499 Euro. Auf Ebay gibt es ihn für 1899 Euro. Zusätzlich verlinkt unser Bestpreis-Link immer automatisch auf das günstigste Angebot. Die Kommunikationsboje Hydrocomm Pure, um den Poolroboter auch unter Wasser steuern zu können, kostet 299 Euro.
Fazit
Der Aiper Scuba X1 Pro Max beeindruckt mit seiner starken Reinigungsleistung und einer intelligenten Navigation, die selbst komplexe Poolbereiche zuverlässig säubert. Besonders die erweiterte Sensorik, der leistungsstarke Motor und die Rückkehr-Funktion zum Entnahmepunkt erleichtern den Alltag. Der Filterwechsel ist etwas fummelig und die Unterwassersteuerung nur gegen Aufpreis verfügbar, was bei dem hohen Preis zu beachten ist. Insgesamt bietet der X1 Pro Max ein rundes, durchdachtes Paket, das im Premiumsegment eine klare Empfehlung darstellt – vorwiegend für Besitzer großer oder komplizierter Pools, die auf Qualität und Komfort setzen.
Preis-Leistungs-Sieger
Dreame Z1 Pro
Der Poolroboter Dreame Z1 Pro legt den Fokus auf Geschwindigkeit und Effizienz bei der Poolreinigung. Wir zeigen, ob sein Gesamtpaket im Test überzeugt.
- Steuerung per Fernbedienung
- solide Reinigungsleistung
- kehrt von allein zur Oberfläche zurück
- Spotreinigung möglich
- Fernbedienung muss genau auf den Z1 Pro zeigen
- laden per Kabel
- keine Fein-Filter-Option
Poolroboter Dreame Z1 Pro Test: Poolreinigung mit Kartierung & Objekterkennung
Der Poolroboter Dreame Z1 Pro legt den Fokus auf Geschwindigkeit und Effizienz bei der Poolreinigung. Wir zeigen, ob sein Gesamtpaket im Test überzeugt.
Mit dem Dreame Z1 Pro soll eine schnelle und effiziente Poolreinigung auch bei größeren Becken gelingen. Das integrierte Navigationssystem sorgt dabei für eine systematische Abdeckung des Beckens. Eine einfache Bedienung und eine lange Akkulaufzeit helfen dabei, auch anspruchsvolle Reinigungsaufgaben ohne Unterbrechung zu erledigen. Wie gut der Dreame Z1 Pro seine Reinigungsarbeit schlussendlich verrichtet, zeigt unser Test.
Das Testgerät hat uns der Hersteller zur Verfügung gestellt.
Design & Verarbeitung: Wie sieht der Dreame Z1 Pro aus?
Der Dreame Z1 Pro ist neben dem „normalen“ Z1 der erste Poolroboter von Dreame. Optisch orientiert er sich klar an seiner Konkurrenz und kommt mit den Raupenketten sowie einem erhöhten Gehäuse daher. Die Ketten erlauben maximale Bewegungsfreiheit am Boden und den Wänden. Anders als die anderen Hersteller setzt Dreame nicht auf einen schlichten schwarzen oder dunkelblauen Anstrich. Der obere Gehäuseteil ist in Silber gehalten und fällt dadurch im Wasser und auch außerhalb auf. Mit 12,1 Kilogramm ist er zudem überraschend leicht, wenn man ihn jedoch aus dem Wasser nimmt, sollte man das zusätzliche Gewicht nicht unterschätzen.
Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

Dreame Z1 Pro Poolroboter – Bilder
Dreame Z1 Pro Poolroboter – Bilder

An der Qualität des Z1 Pro gibt es nichts zu meckern. Alles ist sehr ordentlich verarbeitet und wirkt wertig. Die Farbgebung trägt dazu bei, dass dieser Eindruck lange besteht. Durch das silberne Obergehäuse fallen Wasserflecken nicht so schnell auf, wenn der Roboter nach getaner Arbeit trocknet. Bei schwarzen Modellen sieht man diese deutlich schneller.
Auffällig auf der Oberseite sind nicht nur die beiden Austrittsöffnungen der Pumpen, sondern auch der Sensor dazwischen, der an ein Solarpanel erinnert. Hierbei handelt es sich um einen optischen Sensor, um auch unter Wasser Steuerbefehle von der Fernbedienung zu erhalten. Direkt davor liegen die Power-Taste und die Taste zur Modi-Auswahl. Letztere kann man übrigens oberhalb des Lichtmoduls ablesen. Dort sind eine Status-LED sowie vier Symbole zu finden, wobei jedes für einen anderen Modus steht.
Installation: Wie richtet man den Dreame Z1 Pro ein?
Der Lieferumfang umfasst alles Notwendige. Darin sind neben dem Z1 Pro ein Ladegerät, ein Rückholhaken sowie eine Fernbedienung und ein passendes USB-C-Ladekabel enthalten.
Wer schon einen Dreame-Saugroboter eingerichtet hat, wird sich auch beim Z1 Pro schnell zurechtfinden. Dreame verwendet für die Fernsteuerung, Auswertung der Reinigungsdaten, Updates und Einstellungen nämlich die bekannte App. Entsprechend schnell fügt man den Z1 Pro hinzu und verbindet ihn mit dem WLAN. Alternativ kann man ihn auch, ohne ihn mit der App zu verbinden, einfach einschalten, per integrierter Wahltaste den gewünschten Modus auswählen und zu Wasser lassen.
Bedienung & Steuerung: Wie gut lässt sich der Dreame Z1 Pro bedienen?
Der Dreame Z1 Pro lässt sich auf vielfältige Arten steuern. Die natürlichste Variante ist dabei die Modusauswahl per Wahltaste direkt am Gerät. Hier wählt man zwischen den vier Standardmodi Boden, Wände, Wasserlinie oder komplett. Dieselbe Auswahl steht mit ein paar zusätzlichen Optionen auch in der App bereit. So kann man auch Reinigungsroutinen oder Zonenreinigung aktivieren, um beispielsweise nur die Flachwasserzone von Schmutz zu befreien.
Dreame Z1 Pro – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App

Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App

Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
Dreame Z1 Pro Poolroboter – Bilder App
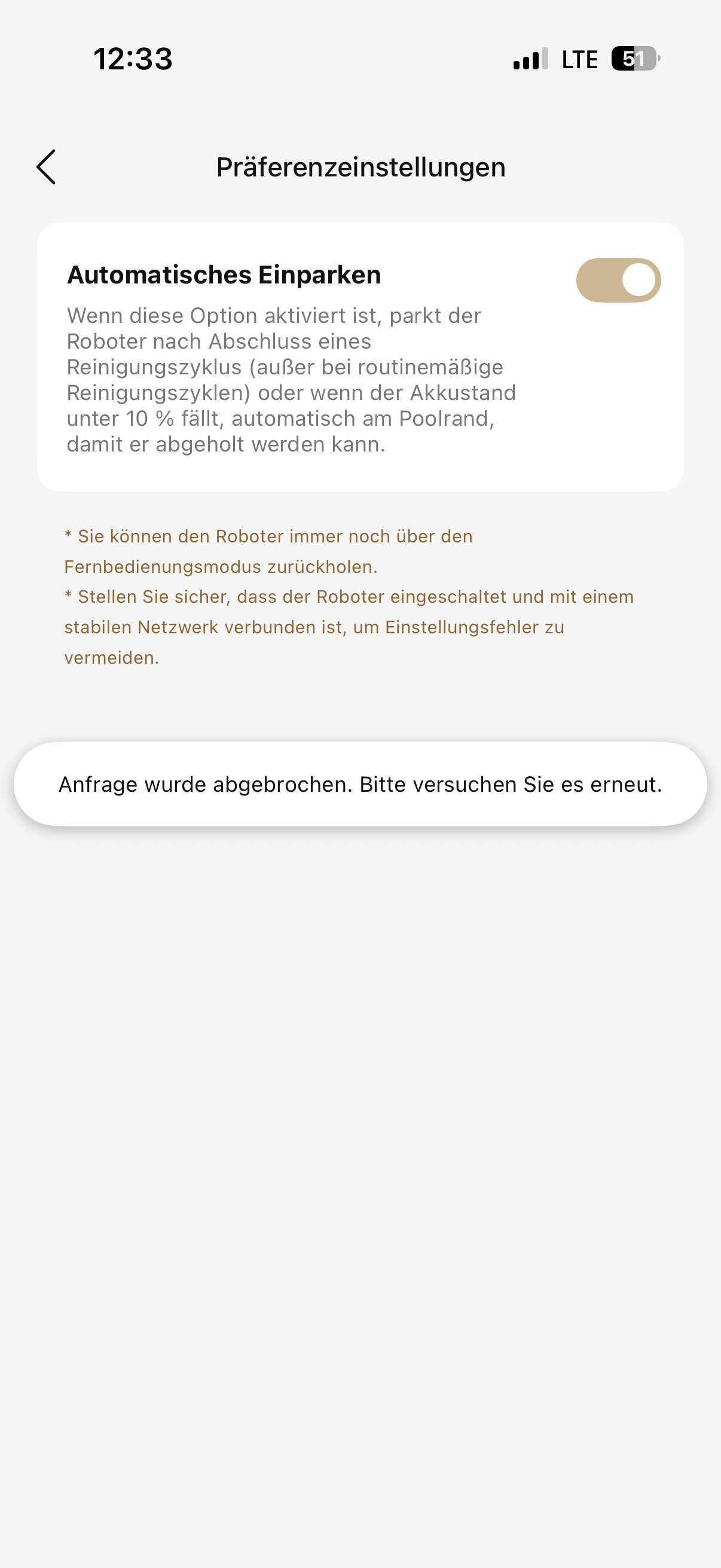
Da jede Steuermethode ihre speziellen Funktionen aufweist, gilt das auch für die Fernbedienung. Mit ihr kann man den Dreame zu einem bestimmten Punkt schicken, um dort zu reinigen oder ihn auch manuell steuern. Über die Fernbedienung steht zudem eine Rückruf-Funktion bereit, die den Z1 Pro an der Wand entlang zur Wasseroberfläche zurückkehren lässt und ihn dort für die Entnahme parkt. Letzteres Feature kann man auch in der App für die automatische Rückkehr aktivieren, wenn die Reinigung abgeschlossen ist oder der Akkustand unter zehn Prozent liegt.
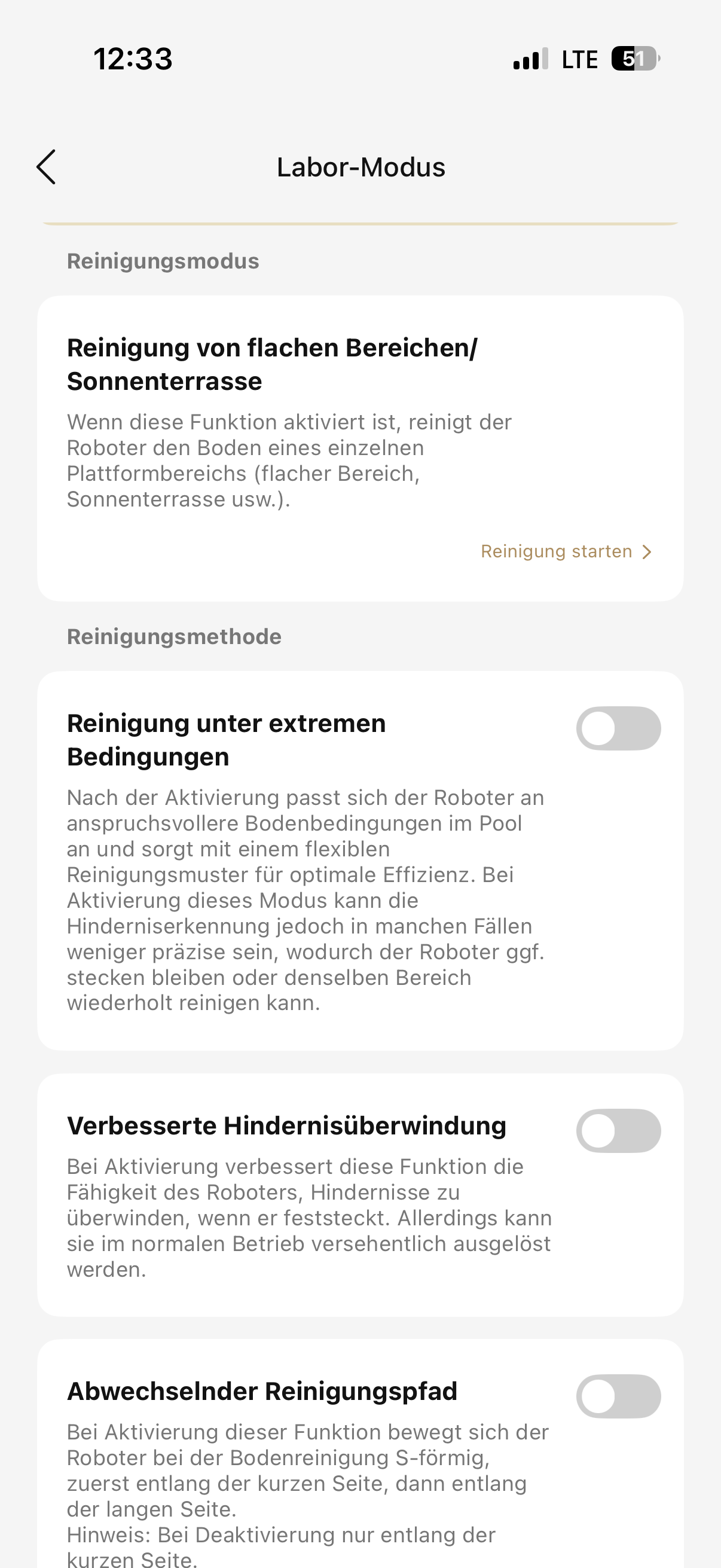
Übrigens gibt Dreame in der App auch zahlreiche experimentelle Funktionen zum Ausprobieren frei. Im passend benannten Labor-Modus aktiviert man Funktionen wie die Einstellung der Reinigungshöhe der Wände oder eine Kartierung im Saugroboter-Stil.
Navigation & Reinigung: Wie findet sich der Dreame Z1 Pro im Wasser zurecht?
Für den Test haben wir das Becken mehrere Tage nicht gesäubert, um die Reinigungsleistung deutlich beurteilen zu können. Der Z1 Pro überrascht dabei nicht nur durch eine hervorragende Leistung auf der Fläche, sondern auch die Ecken und Kanten säubert er einwandfrei. Das gilt auch für die Wasserlinie, die der kräftige Poolhelfer sogar in einer horizontalen Bewegung reinigt. Aufgrund der Auf- und Ab-Bewegung entfernt er den meisten Schmutz und oft bleiben nur die wirklich hartnäckigen Reste für eine manuelle Nachreinigung übrig.
Besonders überraschend war jedoch der Umstand, dass sich der Z1 Pro auch an den Stufen versucht und zumindest im unteren Bereich eine Teilreinigung schaffte. Dabei merkte man ihm deutlich an, dass er Mühe hat, sich nicht festzufahren.
Die Navigation erfolgt mittels Ultraschallsensoren. Zudem gibt es auch eine Infrarot-Objekterkennung. Dreame nennt es das Pool-Sense-System, wodurch auch eine Kartierung des Beckens möglich ist. Dadurch ist man in der Lage, eine Reinigungsstrategie auszuwählen, um verschiedenen Beckentypen gerecht zu werden und diese optimal zu säubern. Für rechteckige Pools erfolgt die Reinigung überwiegend S-förmig, während an den Wänden ein N-förmiger Pfad gewählt wird. Anders als etwa bei Aiper wird das N direkt an der Wand gefahren und nicht am Boden fortgesetzt.
Der Dreame Z1 Pro bietet eine Saugleistung von bis zu 30.000 Litern pro Stunde, was in der Praxis für eine gründliche Entfernung von Schmutz sorgt.
Die Hinderniserkennung funktioniert einigermaßen gut, aber Wunder sollte man hier nicht erwarten. Ein Abfluss oder eine Beleuchtung, die weniger als fünf Zentimeter über dem Boden steht, wird einfach überfahren. Liegt am Boden jedoch ein größerer Gegenstand wie ein Tauchstab, erfolgt die Umfahrung zuverlässig.
Praxiserfahrung: Wie lange hält der Akku des Dreame Z1 Pro?
Während es an der Reinigungsleistung fast nichts zu beanstanden gibt, sorgen andere Punkte für leichten Frust. Der wichtigste ist der Lademechanismus. Typischerweise hält der Akku drei bis vier Stunden und reicht damit bei einem Becken mit 48.000 Litern Wasser für eine vollständige Reinigung von Boden und Wänden aus. Allerdings muss er dann jedes Mal ans Ladekabel. Anders als bei Beatbot oder den neuen Aiper-X1-Modellen lädt er nicht drahtlos, sondern via magnetischem Stecker. Grundsätzlich ist das besser als ein normaler Ladeanschluss mit Dichtungsstopfen – eine Ladestation wäre vor allem in dem Preisbereich eine deutlich elegantere Lösung gewesen. Immerhin ist am Ladekabel ein kleines Mikrofasertuch angebracht, um den Ladeanschluss vorher trocken zu wischen.
Die Fernbedienung ist im Zusammenhang mit Poolrobotern ein innovatives Bedienkonzept, das viele neue Möglichkeiten bringt. Wie bei allen Innovationen muss man in der ersten Generation jedoch mit Kinderkrankheiten rechnen. Nicht immer tut die Fernbedienung, was sie soll, beziehungsweise reagiert der Z1 Pro nicht. Manchmal muss man den Befehl mehrfach senden, damit er die gewünschte Aktion ausführt.
Preis
Der Dreame Z1 Pro hat eine UVP von 1299 Euro, was in Anbetracht der Konkurrenz überraschend preiswert ist. Auf Ebay kostet der Z1 Pro sogar nur 1099 Euro. Günstiger ist der reguläre Z1 von Dreame. Dieser hat dann zwar keine Fernbedienung, kommt ansonsten aber mit einer identischen Reinigungsleistung für 699 Euro.
Fazit
Der Dreame Z1 Pro liefert eine starke Reinigungsleistung und überzeugt mit vielseitigen Steuerungsmöglichkeiten, darunter die Fernbedienung mit Rückruf-Funktion. Die Navigation arbeitet zuverlässig und reinigt auch Ecken, Kanten sowie die Wasserlinie gründlich. Kritik gibt es für das Laden per Kabel und die manchmal unzuverlässige Fernbedienung, die eine genaue Ausrichtung erfordert. Für alle, die große Pools effizient und komfortabel reinigen wollen, bietet der Z1 Pro ein ausgewogenes Gesamtpaket zum fairen Preis. Wer auf die Fernbedienung verzichten kann, findet mit dem Dreame Z1 eine günstigere Alternative mit identischer Reinigungskraft.
Aiper Scuba X1
Der kompakte Poolroboter Aiper Scuba X1 reinigt mittelgroße Pools mit kraftvoller Bürstentechnik und zuverlässiger Navigation. Wir haben ihn getestet.
- günstiger Preis
- gute Reinigungsleistung
- drahtloses Laden
- Filterreinigung umständlich
- keine Kartierung
- keine Schmutzerkennung
Aiper Scuba X1 im Test: Poolroboter mit Ladestation und Steuerung per App
Der kompakte Poolroboter Aiper Scuba X1 reinigt mittelgroße Pools mit kraftvoller Bürstentechnik und zuverlässiger Navigation. Wir haben ihn getestet.
Saubere Pools sind das A und O für Badespaß und Hygiene, doch das manuelle Reinigen kostet Zeit und Mühe. Poolroboter wie der Aiper Scuba X1 versprechen hier Abhilfe: Sie sollen selbstständig den Poolboden, die Wände und die Wasserlinie säubern – zuverlässig und gründlich.
Der kompakte Aiper Scuba X1 zielt vorwiegend auf private Poolbesitzer ab, die hier eine unkomplizierte und effiziente Lösung suchen. Mit moderner Navigation und leistungsstarken Bürsten soll er primär in mittelgroßen Pools überzeugen. Wir haben getestet, ob der Aiper Scuba X1 den Anforderungen gerecht wird – und wie einfach er im Alltag wirklich zu handhaben ist. Das Testgerät hat uns der Hersteller zur Verfügung gestellt.
Design & Verarbeitung: Wie sieht der Aiper Scuba X1 aus?
Poolroboter ähneln sich oft stark in ihrem Erscheinungsbild – ähnlich ist es auch bei einem Saugroboter (Bestenliste). Viele Modelle lassen sich auf den ersten Blick kaum voneinander unterscheiden. Das liegt nicht nur an der oft dunklen Farbgebung, sondern auch an ihrer Form. Anders als bei den Haushaltshilfen setzen die Hersteller nicht auf Antriebsräder, sondern auf praktische Kettenantriebe, wie man sie etwa von Baufahrzeugen kennt. Auch der Aiper Scuba X1 macht da keine Ausnahme und nutzt dieses Fortbewegungsprinzip, das ihn sehr wendig macht und besseren Halt verleiht.
Der in Anthrazit und Schwarz gehaltene Scuba X1 setzt auf Elemente in Carbon-Optik, durch die er weniger wuchtig wirkt. Mit elf Kilogramm gehört er zwar noch zu den leichteren Poolrobotern, ein wirkliches Leichtgewicht ist er trotzdem nicht. Das liegt an den vier bürstenlosen Motoren, den 16 Sensoren sowie dem großzügigen Filterkorb, auf den wir später noch genauer eingehen.
Poolroboter Aiper Scuba X1 – Bilder
Aiper Scuba X1 – Bilder

Aiper Scuba X1 – Bilder
Aiper Scuba X1 – Bilder

Aiper Scuba X1 – Bilder

Aiper Scuba X1 – Bilder

Aiper Scuba X1 – Bilder

Aiper Scuba X1 – Bilder

Aiper Scuba X1 – Bilder

Aiper Scuba X1 – Bilder

Aiper Scuba X1 – Bilder

Aiper Scuba X1 – Bilder

Aiper Scuba X1 – Bilder
Aiper Scuba X1 – Bilder

Aiper Scuba X1 – Bilder

Aiper Scuba X1 – Bilder

Die Verarbeitung ist rundum gelungen und steht auch deutlich teureren Modellen in nichts nach. Im Nassbereich ist das auch entscheidend, denn die IPX8-Zertifizierung garantiert dauerhafte Wasserdichtigkeit – nur mit optimaler Verarbeitung ist das möglich.
Wie schon beim Vorgänger, dem Scuba S1, liegt dem Scuba X1 ein praktischer Haken bei, um den Roboter nach getaner Arbeit aus dem Wasser zu holen. Dafür benötigt man allerdings eine passende Stange.
Neu ist die Ladestation, die der Scuba S1 Pro im Vorjahr nicht hatte. Dadurch entfällt der bisherige Ladeanschluss, der gerne mal Probleme bereitet hat. In der Station lädt der Scuba X1 nun drahtlos, wodurch Wasser gut ablaufen kann, während alle Bedienelemente sowie der Filter hinter einer Klappe gut erreichbar bleiben.
Installation: Was richtet man am Aiper Scuba X1 ein?
Die Einrichtung des Aiper Scuba X1 geht denkbar einfach von der Hand – deutlich unkomplizierter als bei Saugrobotern. Grundsätzlich packt man das Gerät aus, schaltet es ein, wählt den Modus und legt los.
Aiper Scuba X1 – Bilder App
Aiper Scuba X1 – Bilder App
Aiper Scuba X1 – Bilder App

Aiper Scuba X1 – Bilder App
Aiper Scuba X1 – Bilder App
Aiper Scuba X1 – Bilder App
Aiper Scuba X1 – Bilder App
Aiper Scuba X1 – Bilder App
Aiper Scuba X1 – Bilder App
Besser funktioniert es natürlich mit der Aiper-App. Sie findet den mechanischen Poolhelfer in wenigen Schritten und verbindet ihn mit dem heimischen WLAN. Die Verbindung funktioniert zwar nicht unter Wasser, aber an Land hilft die App, den Roboter einzustellen, Updates aufzuspielen oder Reinigungsprotokolle einzusehen. Es empfiehlt sich, den X1 vor dem ersten Einsatz komplett zu laden und per App auf den neuesten Stand zu bringen, um optimale Ergebnisse zu erzielen.
Bedienung & Steuerung
Im Gegensatz zum ähnlich bepreisten Dreame Z1 Pro liefert Aiper keine Fernbedienung mit. Die Steuerung unter Wasser ist somit nicht möglich – oder doch? Für rund 290 Euro bietet Aiper die Hydrocomm Pure Kommunikationsboje an. Damit wechselt man während des Betriebs den Modus oder sieht den Akkustand ein. Teurere Varianten sollen künftig auch Wassertemperatur und pH-Wert messen können. Hydrocomm ist zudem die einzige Möglichkeit, den X1 an die Wasseroberfläche zum einfacheren Herausnehmen zu rufen. Ansonsten muss der Haken zum Einsatz kommen.
In der Praxis steuert man den Roboter meist über den Taster auf der Geräteoberseite, der Ein- und Ausschalter ist und mit einfachem Druck den Modus wechselt. Alternativ geht das über die App.
Der Aiper X1 verfügt über vier Reinigungsmodi: Boden, Wand, Wasserlinie und Smart. Letzterer ist eine Komplettreinigung. Zudem gibt es einen Zeitplan für regelmäßige Beckenreinigung. Der Roboter kann so mehrere Tage im Wasser bleiben und reinigt automatisch, bis der Akku leer ist.
Navigation & Reinigung: Wie smart ist der Aiper Scuba X1?
Vier bürstenlose Motoren und 16 Sensoren sorgen für eine ordentliche Reinigung. Vor allem Ultraschallsensoren helfen dabei, Wände und größere Hindernisse zu erkennen. Eine Kamera oder andere visuelle Komponenten fehlen jedoch, weshalb der X1 weder Karten erstellt noch Schmutz erkennt. Er fährt ein festes Programm ab, bei dem man grob zwischen adaptiven Routen und S-Mustern wählen kann.
Trotz der dadurch fehlenden „Intelligenz“ reinigt der Scuba X1 besser als viele smarte Haushaltsroboter. Das liegt auch daran, dass der Pool weniger komplex ist. Im Smart-Modus reinigt er sowohl Boden als auch Wände, wobei er die Kanten mehrfach abfährt.
Die Reinigungsleistung verdankt er nicht nur den Bürstenwalzen, sondern auch der Saugleistung und dem Filtersystem. Der X1 saugt und filtert pro Stunde bis zu 25.200 Liter Wasser, was beachtlich ist (Vorgänger: 15.900 Liter).
Das Filtersystem besteht nun aus nur noch einem Filterkorb, der leicht herausnehmbar ist. Er verwendet Mikro-Mesh-Filter mit 3 Mikrometer Feinheit, die man je nach Bedarf überziehen kann.
Der Filterkorb fasst fünf Liter, was die Gerätegröße beeinflusst. Allerdings gestaltet sich das Entleeren des Filters etwas umständlich, da sich der Boden nicht öffnen lässt und sich kleine Reste schwer entfernen lassen. Andere Hersteller, etwa Dreame mit dem Z1 Pro, lösen das über eine Bodenklappe deutlich praktikabler.
Wie lange hält der Akku des Aiper Scuba X1?
Die Herstellerangabe von rund drei Stunden Akkulaufzeit bestätigt sich im Test. Unterschiedliche Modi erlauben es, den Roboter auch mehrere Tage im Wasser zu lassen, wenn man nur den Boden reinigt. Für die Komplettreinigung sollte man aber mit einer Aufladung nach jedem Durchgang rechnen.
Praxiserfahrung & Alltagstauglichkeit: Was ist uns aufgefallen?
Positiv fällt auf, dass der Aiper Scuba X1 schnell einsatzbereit ist und mit der drahtlosen Ladung über die Station eine praktische Neuerung gegenüber der früheren Kabelladung bietet.
Schade ist jedoch, dass die Rückruf-Funktion zum Rand nur mit dem Hydrocomm-Zubehör möglich ist. Grundsätzlich sollte es kein Problem sein, den Roboter nach der Reinigung einfach an den Rand zu holen. Andere Hersteller lösen das bereits besser.
Preis
Die UVP des Aiper Scuba X1 beträgt 1499 Euro, aktuell gibt es den Poolroboter aber für 999 Euro bei Amazon. Die Hydrocomm Pure Kommunikationsboje kostet 299 Euro.
Fazit
Der Aiper Scuba X1 bietet für seinen Preis eine ordentliche Reinigungsleistung und punktet mit einer einfachen Bedienung sowie der praktischen drahtlosen Ladestation. Navigation und Programmierung sind solide, auch wenn der Poolroboter keine Karte erstellt oder Schmutz gezielt erkennt. Besonders die Filterreinigung gestaltet sich umständlich, was den alltäglichen Einsatz etwas erschwert. Für alle, die einen bezahlbaren Poolroboter für mittelgroße Pools suchen und auf smarte Extras verzichten können, ist der X1 eine klare Empfehlung.
Beatbot Aquasense 2 Ultra
Der Poolroboter Beatbot Aquasense 2 Ultra verfügt über eine ausgeklügelte Sensorik und intelligente Navigation. Ob er damit präzise reinigt, zeigt der Test.
- hervorragende Reinigungsleistung
- im Skimmer-Modus per App steuerbar
- setzt Klärungsmittel frei
- sehr hoher Preis
- Filterreinigung unnötig schwierig
Poolroboter Beatbot Aquasense 2 Ultra im Test: Poolreinigung mit KI-Kamera & App
Der Poolroboter Beatbot Aquasense 2 Ultra verfügt über eine ausgeklügelte Sensorik und intelligente Navigation. Ob er damit präzise reinigt, zeigt der Test.
Der Beatbot Aquasense 2 Ultra soll vorwiegend diejenigen ansprechen, die Wert auf smarte Technik und eine umfassende Reinigung von Böden, Wänden und Wasserlinien legen. Er passt sich flexibel an unterschiedliche Poolformen und -größen an und bietet mit seiner effektiven Schmutzerkennung eine Reinigung, die augenscheinlich deutlich über das Niveau vieler Konkurrenten hinausgeht. Unser Test zeigt, wie sich der Aquasense 2 Ultra im Alltag tatsächlich schlägt und ob er die hohen Erwartungen, die mit dem hohen Preis einhergehen, erfüllt. Das Testgerät hat uns der Hersteller zur Verfügung gestellt.
Design & Verarbeitung
Bereits der Vorgänger Beatbot Aquasense Pro ist ein hervorragend verarbeiteter Poolroboter. Mit dem Aquasense 2 Ultra legt Beatbot jetzt noch einmal eine Schippe darauf. Schon beim Auspacken fällt auf, dass er wie ein futuristischer Roboter aussieht. Im eleganten, dunkelblauen Gehäuse arbeiten 27 Sensoren und 11 Motoren. KI-Systeme unterstützen die Reinigung – unabhängig von der Größe oder Form des Beckens.
Zur Fortbewegung kommen die typischen Raupenketten zum Einsatz, die den Helfer sehr wendig machen und ihn davor schützen, sich festzufahren. Auffällig sind jedoch die beiden Seitenbürsten, die nicht für Ecken und Kanten gedacht sind, sondern das Wasser in den Filter fördern.
Beatbot Aquasense 2 Ultra – Bilder
Beatbot Aquasense 2 Ultra – Bilder
Beatbot Aquasense 2 Ultra – Bilder

Beatbot Aquasense 2 Ultra – Bilder
Beatbot Aquasense 2 Ultra – Bilder

Beatbot Aquasense 2 Ultra – Bilder
Beatbot Aquasense 2 Ultra – Bilder

Beatbot Aquasense 2 Ultra – Bilder
Beatbot Aquasense 2 Ultra – Bilder

Beatbot Aquasense 2 Ultra – Bilder
Beatbot Aquasense 2 Ultra – Bilder

Beatbot Aquasense 2 Ultra – Bilder
Beatbot Aquasense 2 Ultra – Bilder

Beatbot Aquasense 2 Ultra – Bilder
Beatbot Aquasense 2 Ultra – Bilder

Beatbot Aquasense 2 Ultra – Bilder
Beatbot Aquasense 2 Ultra – Bilder

Beatbot Aquasense 2 Ultra – Bilder
Beatbot Aquasense 2 Ultra – Bilder

Beatbot Aquasense 2 Ultra – Bilder
Beatbot Aquasense 2 Ultra – Bilder

Beatbot Aquasense 2 Ultra – Bilder
Beatbot Aquasense 2 Ultra – Bilder

Beatbot Aquasense 2 Ultra – Bilder
Beatbot Aquasense 2 Ultra – Bilder

Auf der Oberseite befinden sich ein praktischer Tragegriff sowie Klappen für den Zugang zum Filter und zum zusätzlichen Reinigerfach. Das kleine Kontrollpanel mit fünf Tasten erlaubt die Modi-Auswahl und das Einschalten des Beatbot Aquasense 2 Ultra. Eine LED-Leiste informiert über den Ladestand und eventuelle Probleme.
Der Lieferumfang ist großzügig: Neben dem üblichen Rückholhaken liegen ein Ersatzpaar Seitenbürsten, passende Schrauben, ein Schraubenzieher, ein wasserfestes und staubgeschütztes Cover für den Einsatz auf der Terrasse sowie eine praktische Transporttasche bei. Ein drahtloses Ladedock ist ebenfalls inkludiert und nach IPX4 wasserfest.
Installation: Wie leicht ist der Beatbot Aquasense 2 Ultra einzurichten?
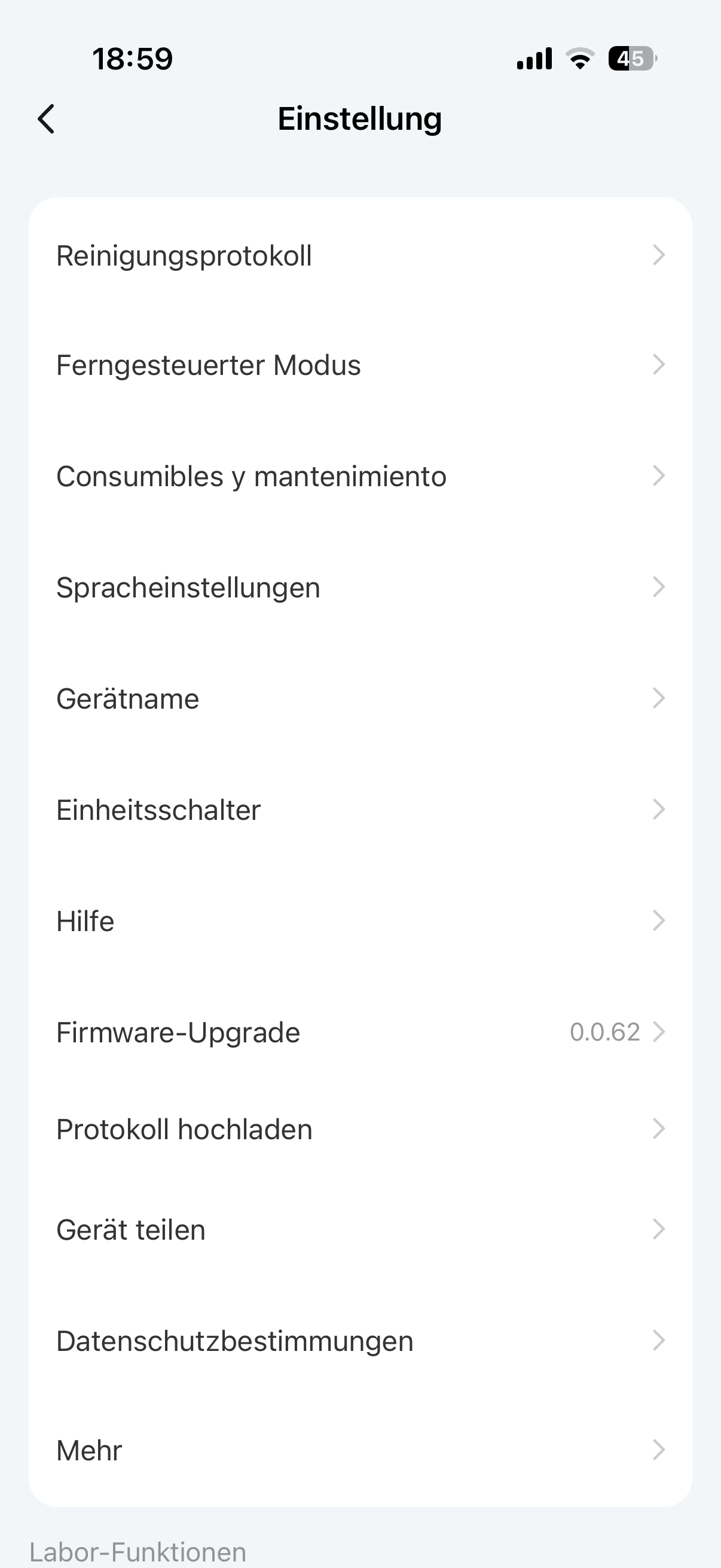
Grundsätzlich lässt sich der Beatbot auch ohne App nutzen, aber mit App-Anbindung ist das Nutzungserlebnis deutlich besser. Die Einrichtung erfordert nur wenige Schritte: App aus dem Store laden, für Konto registrieren, Beatbot einschalten und in der App per Plus-Symbol hinzufügen. Anschließend richtet man das WLAN ein und installiert ein erstes Update – danach steht der Reinigung nichts mehr im Weg.
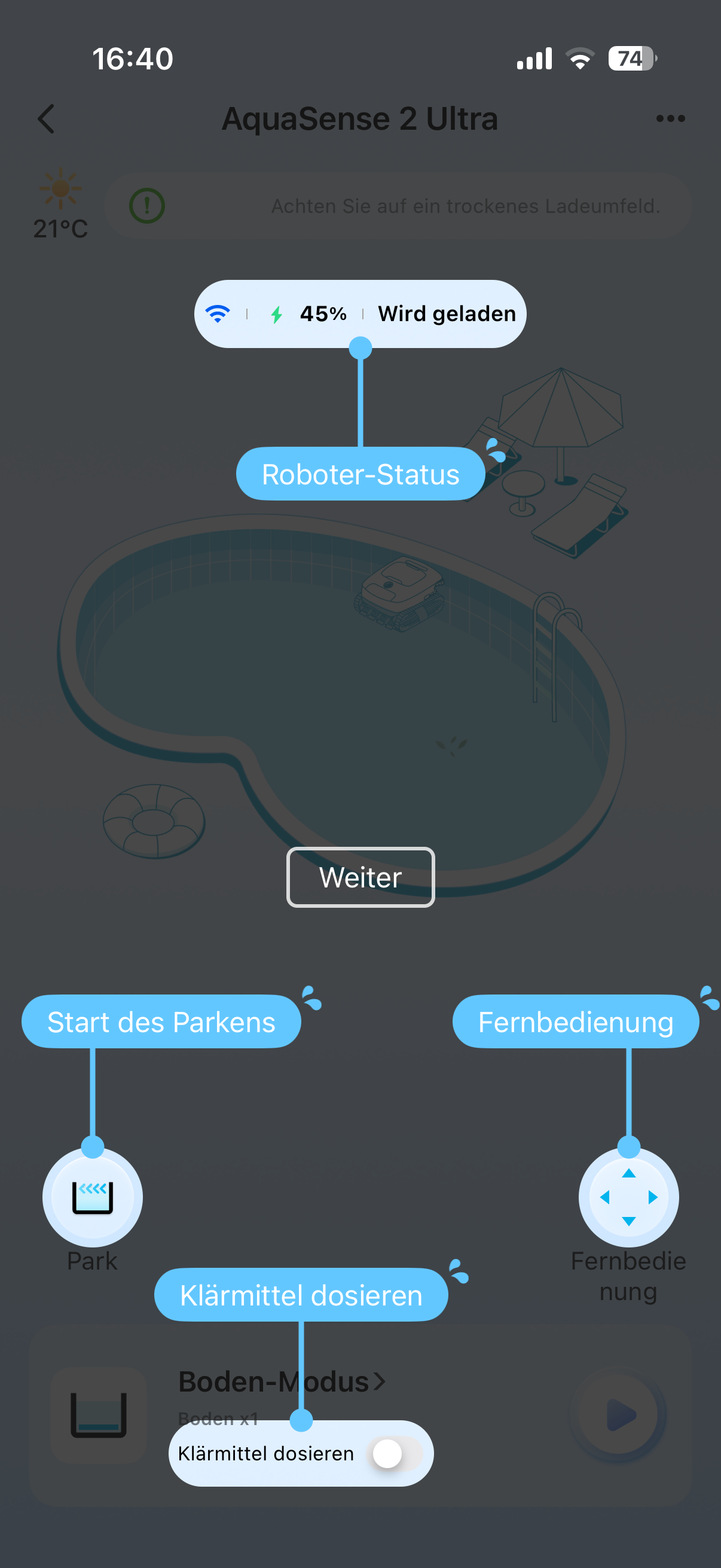
Bedienung & Steuerung
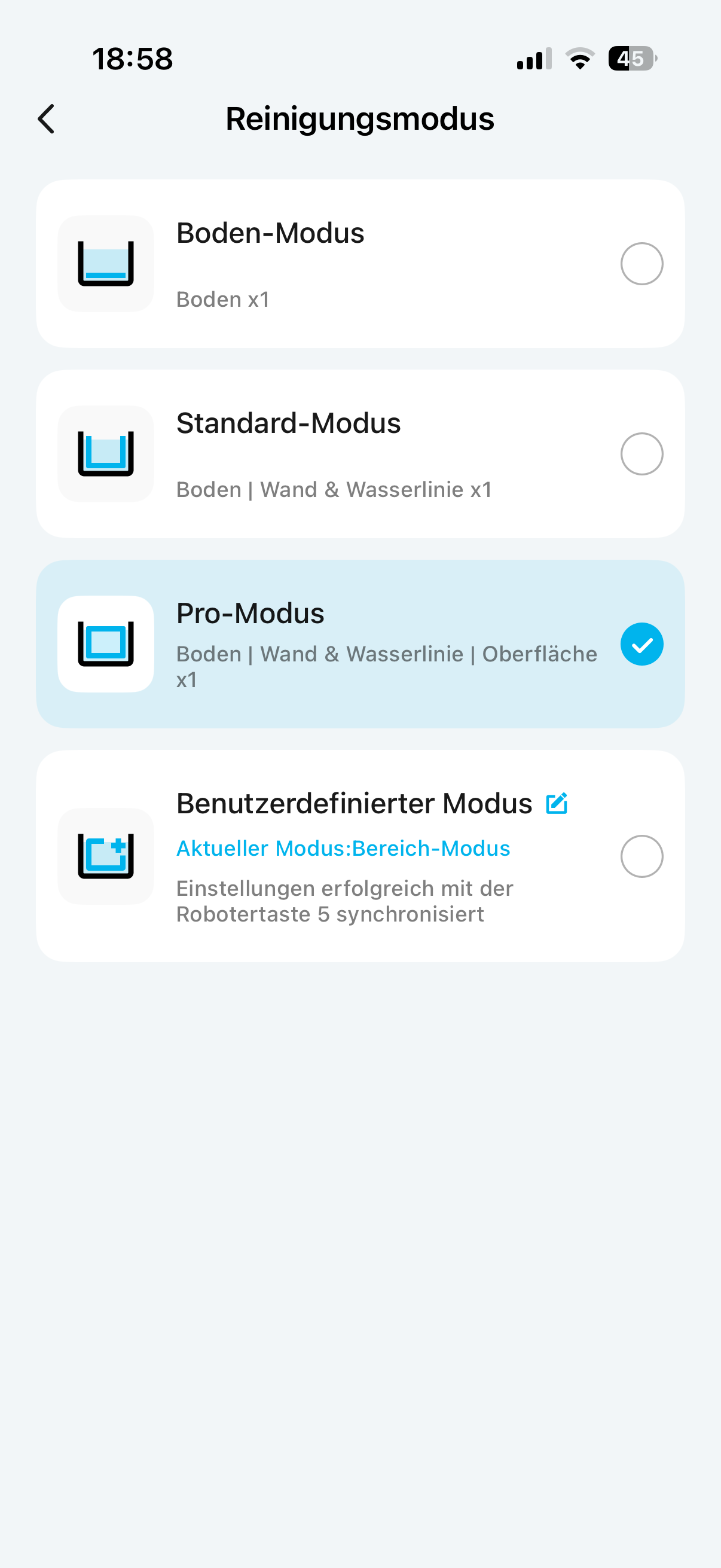
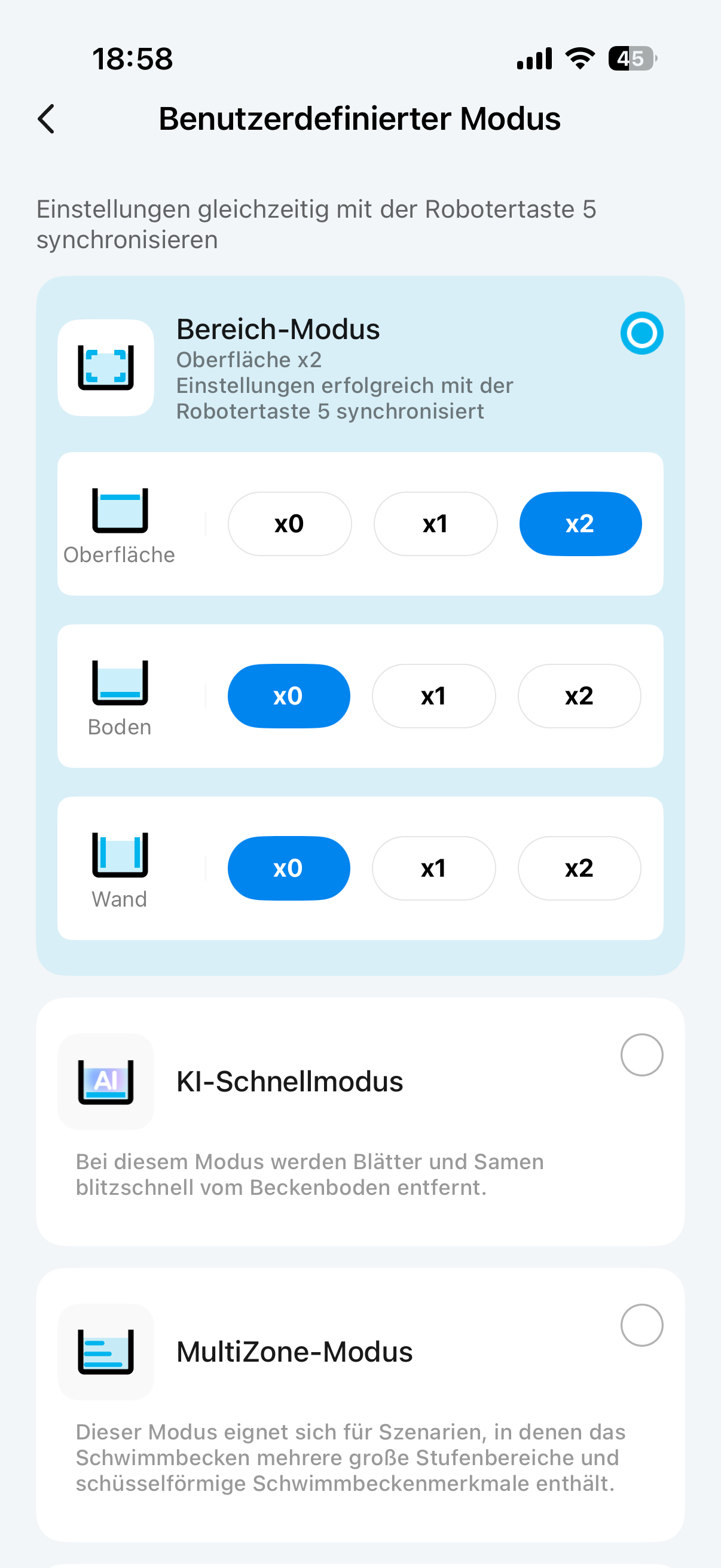
In der App und am Gerät stehen verschiedene Modi zur Auswahl. Für Einsteiger gibt es „Boden“, „Standard“ und „Pro“, die sich in der Intensität und Umfang der Reinigung unterscheiden. Der Bodenmodus reinigt nur den Poolboden, Standard umfasst auch Wände und Wasserlinie, im Pro-Modus reinigt der Bot zusätzlich die Wasseroberfläche.
Der benutzerdefinierte Modus erlaubt weitere Optionen wie Bereichsreinigung, Multizone, Eco- und KI-Schnellmodus. Die Auswahl für den benutzerdefinierten Modus liegt auf der fünften Taste am Roboter, so ist der Beatbot auch ohne App steuerbar.
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App

Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App

Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App

Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App
Beatbot Aquasense 2 Ultra – Bilder App

Der Aquasense 2 Ultra kann wie der Aiper X1 Pro Max die Wasseroberfläche absaugen – ähnlich einem Skimmer. Über die App ist es möglich, den Roboter manuell zu steuern, sobald er aufgetaucht ist und sich in Reichweite von WLAN oder Bluetooth befindet. Aus der Parkposition lässt sich der Beatbot zurück zur Wasseroberfläche rufen, um ihn einfach aus dem Pool zu heben.
Sonderfunktionen fehlen, etwa eine vollautomatische Reinigungsplanung, wie sie Dreame-Modelle bieten. Die App zeigt kleinere Übersetzungsfehler, erlaubt aber den Zugriff auf Wetterdaten inklusive der Wassertemperatur
Navigation & Reinigung
Der Beatbot Aquasense 2 Ultra verfügt über 27 Sensoren und nutzt KI, Radar-, Infrarot- und Ultraschallsensoren, um sich im Pool zu orientieren und ihn zu kartieren. Beatbot bewirbt das Gerät als weltweit ersten 5-in-1-Poolroboter mit KI-Unterstützung.
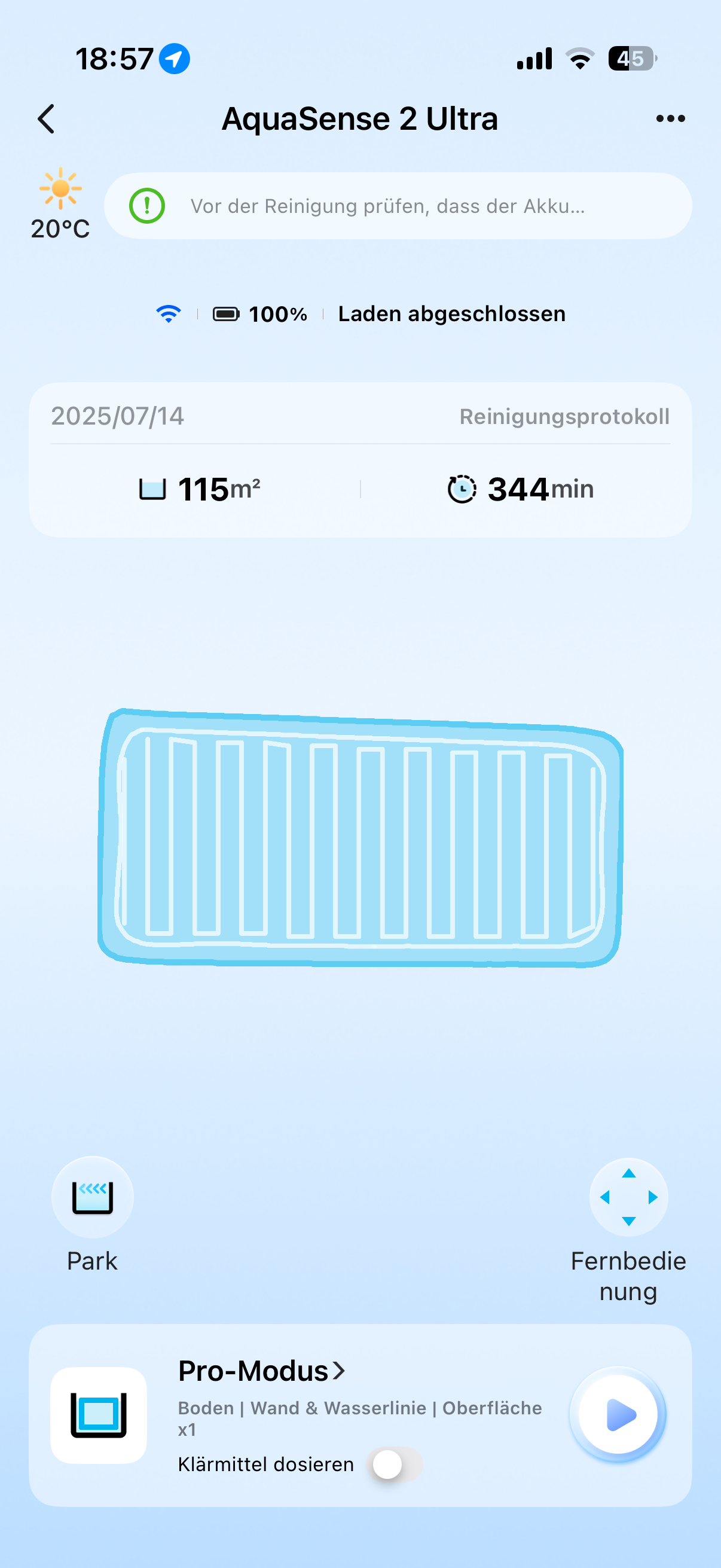
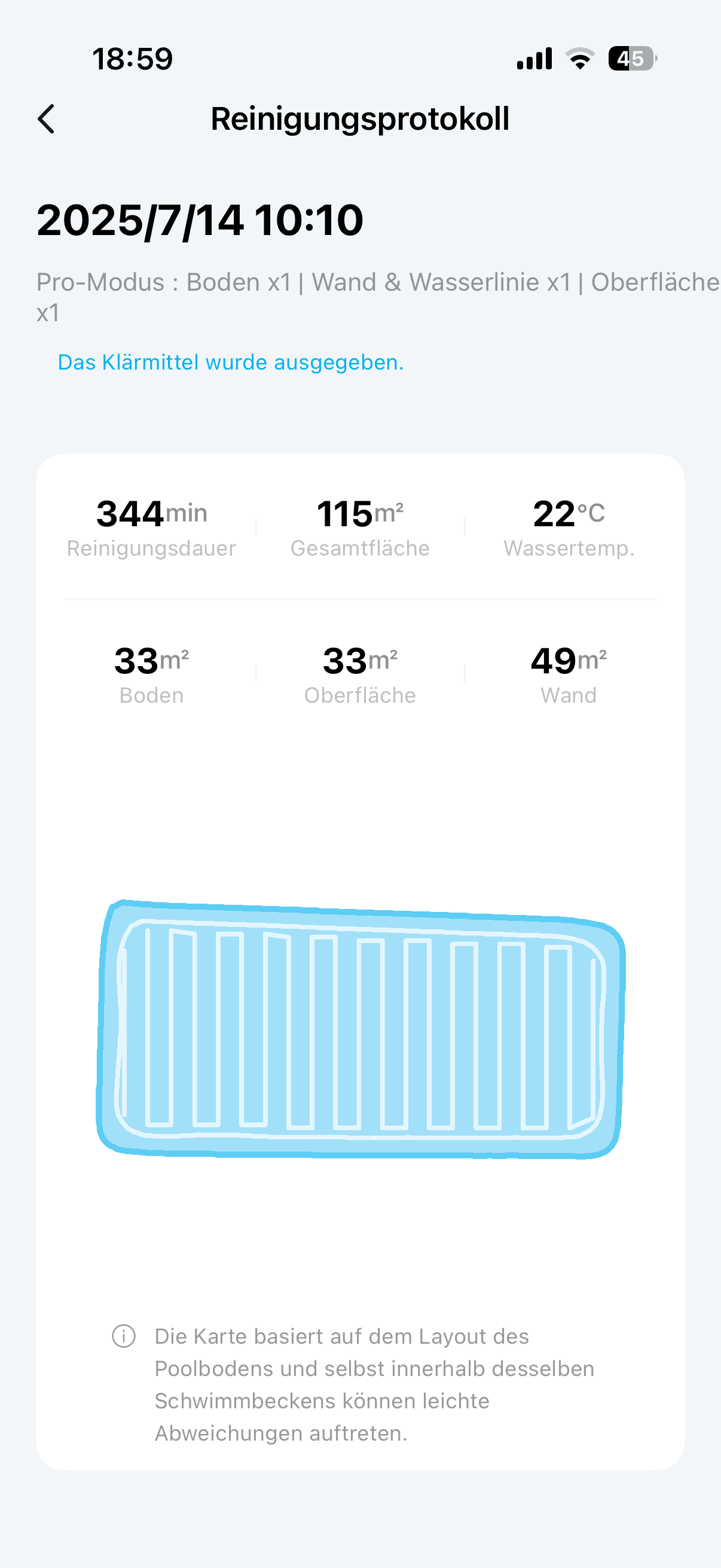
Die Schmutzerkennung befindet sich noch im Laborstadium, der KI-Schnellmodus entfernt groben Schmutz wie Blätter, arbeitet dabei aber eher ruhig und benötigt für einen s-förmigen Reinigungsweg 344 Minuten – deutlich länger als der Aiper Scuba X1 Pro Max, der beispielsweise nur 119 Minuten braucht. Das Reinigungsergebnis ist tadellos: Boden, Ecken und Kanten säubert er gründlich, Treppenstufen erkennt er und umfährt sie sicher.
Ein Highlight ist die mitgelieferte Klärmittel-Kartusche, die der Roboter während der Reinigung automatisch freisetzt. Das auf Krabbenschalen basierende Mittel bindet Schmutz, Öle und Rückstände und unterstützt die Filterfunktion.
Der Filter besteht aus zwei ineinander gesteckten Einheiten: Ein grober Filter hält Partikel bis 250 Mikrometer zurück, der äußere filtert bis 150 Mikrometer. Feinere Partikel, wie beim Aiper X1 Pro Max, werden nicht erfasst. Das Filterkonstrukt lässt sich zudem nicht besonders komfortabel öffnen und reinigen, was ein klarer Nachteil ist.
Akku: Wie lange kann der Beatbot Aquasense 2 Ultra reinigen?
Die Betriebszeit liegt bei etwa fünf Stunden und entspricht dem Niveau anderer Modelle. Im Eco-Modus kann der Roboter auch über mehrere Tage im Pool verbleiben, reinigt dann aber nur den Boden. Es empfiehlt sich, den Beatbot nach jeder Reinigung ins Ladedock zu stellen, um stets einsatzbereit zu sein.
Preis
Der Beatbot Aquasense 2 Ultra hat eine UVP von 3850 Euro – ein sehr hoher Preis, der deutlich über dem der Modelle von Aiper und Dreame liegt. Derzeit gibt es den Poolroboter für 3079 Euro.
Fazit
Der Beatbot Aquasense 2 Ultra bietet eine exzellente Reinigungsqualität und überzeugende smarte Funktionen. Die intelligente Navigation, die umfassende Sensorik und die Schmutzerkennung mit Klärmittelfreisetzung machen ihn zu einem der fortschrittlichsten Poolroboter auf dem Markt. Trotz der längeren Reinigungsdauer erreicht er ein gründliches Ergebnis, das selbst komplexe Poolstrukturen zuverlässig säubert.
Der hohe Preis und die umständliche Filterreinigung trüben den Gesamteindruck. Auch fehlen experimentelle Zusatzfunktionen, wie sie bei anderen Geräten häufiger vorkommen. Für Poolbesitzer mit höchsten Ansprüchen an Technik und Sauberkeit ist der Beatbot Aquasense 2 Ultra dennoch eine interessante Option – vorausgesetzt, man ist bereit, tief in die Tasche zu greifen. In der Praxis greifen die meisten jedoch besser zum günstigeren Aquasense 2 Pro oder zu einem vergleichbaren Konkurrenzmodell. Die KI-Funktionen sind zwar nett, rechtfertigen den Aufpreis bislang aber nicht.
Wer maximale Reinigungsleistung sucht und den Preis nicht scheut, trifft mit dem Aquasense 2 Ultra eine exzellente Wahl – alle anderen sind mit dem Pro-Modell besser beraten.
Schnäppchen
Wybot C2 Vision
Der Poolroboter Wybot C2 Vision wartet mit einer innovativen Kameratechnik auf. Im Test zeigen wir, wie gut er sich in der Praxis schlägt.
- günstiger Preis
- KI-Schmutzerkennung
- viele Reinigungsmodi
- Probleme mit der App
- Stufenreinigung könnte besser sein
- kein drahtloses Laden
Wybot C2 Vision Test: Poolroboter mit Kamera-Navigation & KI für unter 700 Euro
Der Poolroboter Wybot C2 Vision wartet mit einer innovativen Kameratechnik auf. Im Test zeigen wir, wie gut er sich in der Praxis schlägt.
Mit dem Wybot C2 Vision bringt Wybotics einen Poolroboter auf den Markt, der durch seine kamerabasierte Navigation auffällt. Ausgestattet mit einem Kamerasystem erkennt der C2 Vision den Pool präzise und passt so seine Reinigungsstrategie intelligent an die Poolform und den erkannten Schmutz an. Wir haben getestet, ob seine Reinigung überzeugt und wie sich der Roboter im Hinblick auf Bedienung und Ausstattung schlägt. Das Testgerät hat uns Geekmaxi zur Verfügung gestellt.
Design & Verarbeitung
Der Wybot C2 Vision kommt im modernen, kompakten Design mit klaren Linien und typischen Materialien. Das Gehäuse wirkt robust und gut verarbeitet, sodass der Roboter auch in anspruchsvollen Poolumgebungen zuverlässig arbeitet. Die Farbgebung in dezentem Anthrazit mit türkisfarbenen Highlights gefällt.
Der Wybot ist mit dem für Poolroboter typischen Kettenantriebssystem ausgestattet, das für gute Traktion auf glatten Oberflächen sorgt. Auffällig ist die Kamera, die auf der Vorderseite relativ zentral platziert ist. Über diese Kamera erkennt der Roboter nicht nur seine Umgebung, sondern auch Verschmutzungen, um sie gezielt anzugehen.
Wybot C2 Vision – Bilder
Wybot C2 Vision – Bilder

Wybot C2 Vision – Bilder

Wybot C2 Vision – Bilder

Wybot C2 Vision – Bilder

Wybot C2 Vision – Bilder

Wybot C2 Vision – Bilder

Wybot C2 Vision – Bilder

Wybot C2 Vision – Bilder

Wybot C2 Vision – Bilder

Im Lieferumfang sind neben dem Roboter und einem Ladekabel ein Rückholhaken sowie ein ultrafeiner Filter enthalten. Letzteren setzt man wahlweise zusätzlich ein, um besonders kleine Partikel aus dem Wasser zu filtern.
Installation: Was richtet man am Wybot C2 Vision ein?
Die Einrichtung des Wybot C2 Vision gestaltet sich einfach. Nach dem Auspacken schließt man den Poolroboter zunächst an die Steckdose an, um ihn vollständig zu laden; kabelloses Laden per Station ist nicht möglich. Während des Ladevorgangs richtet man problemlos die Verbindung zur App ein. Dabei erfolgt die Erkennung in der Wybot-App automatisch und geht schnell von der Hand. Nach dem Laden kann der Wybot auch schon direkt ins Wasser.
Bedienung & Steuerung
Der Wybot C2 Vision lässt sich über die App komfortabel steuern – solange er sich bisher nicht im Wasser befindet. Das ist nicht ungewöhnlich, da Wasser die meisten Verbindungen – etwa via Bluetooth oder WLAN – unterbricht. Andere Hersteller haben dafür schon smarte Lösungen gefunden, die sich jedoch im Preis widerspiegeln.
Neben den Standardmodi für Boden, Wände und Wasserlinie steht ein Komplettmodus zur Verfügung, der alle Bereiche abdeckt. Zudem gibt es für den Boden zwei zusätzliche Modi: Turbo und Eco. Der Turbo-Modus ist sinnvoll, wenn sich im Becken nur wenig Schmutz befindet und man diesen vor dem Badegang noch schnell entfernen möchte.
Besonders spannend ist jedoch der Schmutzerkennungsmodus. Mittels der Kamera kann der Wybot C2 Vision nämlich Schmutz am Boden erkennen und diesen gezielt reinigen. Dabei fährt er den Schmutz so lange an, bis dieser vollständig entfernt ist. In diesem Modus konzentriert sich der Roboter ausschließlich auf erkannte Schmutzstellen, eine vollständige Poolreinigung erfolgt dabei nicht. Für eine Komplettreinigung gibt es andere Modi.
Übrigens kann man auch Zeitpläne in der App erstellen sowie Reinigungsmuster festlegen. Der C2 Vision fährt dann etwa in einer S-Linie oder Kreuzmuster den Pool ab. Auch ein Sternmuster zur Mitte des Pools ist dabei möglich – je nach Vorliebe.
Navigation & Reinigung: Wie smart ist der Wybot C2 Vision?
Die kamerabasierte Navigation macht den Wybot C2 Vision besonders effektiv. Er erkennt die Poolform genau, plant die Reinigungsroute optimal und passt sie dynamisch an Hindernisse und Besonderheiten an. Dabei umfährt er etwa den Bodenablauf oder andere größere Objekte im Becken.
Im Test entfernt der Roboter zuverlässig Algen, Schmutz und Blätter vom Poolboden. Die Bürsten und die Saugleistung überzeugen sowohl auf glatten Flächen als auch an den Wänden. Die Wasserlinie fährt er gründlich ab. Nur in den Ecken und bei den Stufen hat er ein paar Schwierigkeiten bei der Reinigung.
Die Filtereinheit fängt ausreichend Schmutz, bedarf aber einer manuellen Entleerung, was etwas umständlich ist, da sich der Boden nicht öffnen lässt. Immerhin kann der Deckel vollständig abgenommen werden. Positiv ist hingegen, dass der ultrafeine Filter (10 Mikrometer) in Form einer Platte daherkommt, die hinter der Filtereinheit sitzt. Dadurch ist dieser sehr einfach abzuspülen und auszutauschen.
Akku: Wie lange hält der Wybot C2 Vision durch?
Der Wybot C2 Vision verfügt laut Hersteller über einen Akku, der Laufzeiten von bis zu drei Stunden ermöglicht. Das schafft er in unserem Test tatsächlich, und es reicht aus, um auch größere Pools gründlich zu säubern. Sollte der Akku vor Abschluss der Reinigung leer sein, bleibt der Wybot C2 Vision am Boden, wo man ihn mittels des Rückholhakens birgt. Allerdings muss man das ebenso, wenn er den Reinigungsprozess regulär beendet hat. Die Ladezeit beträgt etwa 3 Stunden, was für ein Gerät dieser Klasse üblich ist.
Preis: Wie viel kostet der Wybot C2 Vision?
Bei Geekmaxi gibt es den Wybot C2 Vision mit dem Rabatt-Code 5B1NDUXW für 657 Euro statt 684 Euro (gültig bis 13. August 2025). Normalerweise liegt der Preis dort bei 768 Euro. Angesichts der fortschrittlichen Kamera-Navigation, der guten Ausstattung und der flexiblen App-Steuerung bietet der Poolroboter ein hervorragendes Preis-Leistungs-Verhältnis.
Fazit
Der Wybot C2 Vision beeindruckt nicht nur mit seinem vergleichsweise niedrigen Preis. Auch die intelligente, Kamera-gestützte Navigation und die gründliche Reinigungsleistung können sich sehen lassen. Damit besteht er problemlos auch gegen deutlich teurere Modelle. Die Steuerung per App ist umfangreich, wenn auch anfangs etwas komplex, bietet jedoch viele Anpassungsmöglichkeiten. Die solide Verarbeitung und der faire Preis runden das positive Bild ab.
AGT PRR-120 Poolroboter
Einfach statt smart: Der AGT PRR-120 reinigt Pools ohne App und Schnickschnack – und überzeugt im Test bei Bodenflächen und einfachen Becken.
- solide Reinigungsleistung am Boden
- reduziertes Bedienkonzept direkt am Gerät (Schieberegler)
- schnell einsatzbereit
- keine App, keine Zeitpläne, keine Protokolle
- fährt ohne Plan
- kein Feinfilter
AGT PRR-120 im Test: Günstiger Poolroboter – einfach zu bedienen
Einfach statt smart: Der AGT PRR-120 reinigt Pools ohne App und Schnickschnack – und überzeugt im Test bei Bodenflächen und einfachen Becken.
Der AGT PRR-120 orientiert sich optisch an den großen Vorbildern: großer, abgerundeter Korpus, markante Front, weißes Gehäuse. Anders als viele Premium-Modelle verzichtet er jedoch auf App-Anbindung und digitale Extras. Die Reinigungsmodi werden per Schieberegler direkt am Gerät gewählt – so reduziert der PRR-120 die Poolpflege aufs Wesentliche, bleibt aber praxistauglich. Im Test haben wir geprüft, wie gut dieses Konzept in unterschiedlichen Beckentypen funktioniert.
Das Testgerät wurde uns vom Online-Shop Pearl zur Verfügung gestellt.
Design & Verarbeitung
Die weiße Außenschale wirkt robust und hochwertig verarbeitet. Der PRR‑120 rollt auf Rädern, die im Alltag ausreichende Traktion und Wendigkeit bieten. An der Front sitzen zwei aktive Walzen, die Schmutz vom Boden lösen und den Wasserstrom in die Ansaugöffnung leiten. Hochpreisige Modelle setzen hier oft auf weitere Walzenpaare, stärkere Anpresskraft und größere Ansaugkanäle – was in Fugen und an Kanten mehr mechanischen „Biss“ erzeugt. Der PRR‑120 bleibt bewusst schlicht: schnell zerlegbar, Filterkorb leicht zugänglich, einfache Wartung statt maximaler Angriffslust.
Installation
Die Inbetriebnahme gelingt in wenigen Minuten: Netzteil anschließen, Akku laden, gewünschten Modus per Schieberegler wählen, ins Becken setzen – fertig. Eine App- oder WLAN-Einrichtung entfällt, was den PRR‑120 auch für technisch weniger versierte Nutzer attraktiv macht.
Bedienung & Steuerung
Der Schieberegler am Gerät schaltet zwischen den verfügbaren Reinigungsprogrammen. Je nach Ausführung stehen Boden, ggf. Boden + Wand sowie ein kompletter Standardlauf zur Auswahl. Auf Zusatzfunktionen wie Zeitpläne, Reinigungsprotokolle oder Spotmodi verzichtet der PRR‑120. Das passt zum Minimalansatz, kostet aber Komfort, wenn man regelmäßige Abläufe automatisieren möchte.
Navigation & Reinigung
Mit ordentlicher Saug- und Strömungsleistung bearbeitet der PRR‑120 den Poolboden zuverlässig. Anders als smarte Premium-Modelle fährt er jedoch keine geplanten S-/N-Bahnen und erstellt keine Beckenkarten. Stattdessen bewegt er sich „zufällig“ durchs Becken, korrigiert an Kanten und deckt mit der Zeit große Teile der Fläche ab.
In einfachen, mittelgroßen Pools reicht das oft aus. In komplexeren Grundrissen bleiben aber eher Flächen aus, als dies bei Aiper, Dreame & Co. der Fall ist. Die Wasserlinie reinigt er ebenso unregelmäßig, einen Oberflächen‑/Skimmer-Modus gibt es nicht. Pluspunkt: Der Filter ist leicht erreichbar und schnell ausgespült. Komfortdetails wie eine Bodenklappe fehlen, ebenso ein ultrafeiner Filtereinsatz – für groben Schmutz genügt der vorhandene jedoch.
Akku & Laufzeit
Die Laufzeit liegt im Klassenmittelfeld und reicht für typische Reinigungsgänge in mittelgroßen Becken. Bei größeren Flächen empfiehlt sich ein zweiter Durchlauf. Da der PRR‑120 keine App-Statistiken liefert, behält man die Betriebsdauer klassisch im Blick.
Preis
Mit einem Preis von knapp 460 Euro positioniert sich der AGT PRR‑120 unterhalb smarter Premium-Konkurrenz, aber oberhalb einfacher Bodenläufer. Er bietet spürbar mehr Substanz und ansprechendere Optik als Minimalmodelle, ohne ins High-End-Segment vorzustoßen.
Fazit
Der AGT PRR-120 reduziert die Poolreinigung aufs Wesentliche: Modus am Schieberegler wählen, starten – fertig. Auf Bodenflächen und in einfach geformten Becken liefert er überzeugende Ergebnisse. Der Verzicht auf App-Anbindung, Kartierung und programmierbare Fahrwege schränkt jedoch die Abdeckung in komplexeren Pools ein.
Wer auf Zeitpläne, Mapping oder Skimmer-Modus verzichten kann und ein unkompliziertes Gerät sucht, erhält mit dem PRR-120 einen pragmatischen Alltagshelfer. Für maximale Flächenabdeckung und Komfortfunktionen sind smarte Modelle jedoch die bessere Wahl.
Qytron Spider QP01
Der Poolroboter Qytron Spider QP01 setzt auf Simplizität – keine smarte Technik oder App, dafür unkomplizierte Handhabung. Wir prüfen, ob die Strategie aufgeht.
- besonders effektiv im Rundbecken
- Filter unkompliziert zu reinigen
- kompakt und leicht
- günstiger Preis
- reinigt ausschließlich den Boden
- zufällige Fahrweise ohne System
- keine App und Navigation
- keine Bürste oder Kettenantrieb
Was kann der Poolroboter für 150 Euro? Qytron Spider QP01 im Test
Der Poolroboter Qytron Spider QP01 setzt auf Simplizität – keine smarte Technik oder App, dafür unkomplizierte Handhabung. Wir prüfen, ob die Strategie aufgeht.
Der Qytron Spider QP01 ist besonders für kleinere, runde Pools gedacht. Mit kabellosem Betrieb, simpler Bedienung ohne App und einem einfach zu reinigenden Filter richtet sich der Spider an alle, die ohne viel Aufwand den Poolboden sauber halten möchten. Wo seine Stärken und Schwächen liegen, zeigt unser Praxistest.
Das Testgerät wurde uns von Banggood zur Verfügung gestellt.
Design & Verarbeitung
Das sehr kompakte Gehäuse macht den Qytron Spider äußerst handlich und erinnert entfernt an einen Curling-Stein. Statt Kettenantrieb oder Bürste rollen vier einfache Räder über den Poolboden. Die dunkle Farbgebung sorgt für gute Sichtbarkeit unter Wasser. Ähnlich wie bei einem Werkstatt-Staubsauger kann man den oberen Teil mit der Saugeinheit abnehmen und kommt dadurch einfach an den Filter. Dieser sitzt zentral und lässt sich mit wenigen Handgriffen ausleeren und abspülen. Die Verarbeitung ist für die Preisklasse robust und allgemein sehr ordentlich.
Qytron Spider QP01 – Bilder
Qytron Spider QP01 – Bilder
Qytron Spider QP01 – Bilder

Qytron Spider QP01 – Bilder
Qytron Spider QP01 – Bilder

Qytron Spider QP01 – Bilder
Qytron Spider QP01 – Bilder

Qytron Spider QP01 – Bilder
Qytron Spider QP01 – Bilder

Qytron Spider QP01 – Bilder
Qytron Spider QP01 – Bilder

Qytron Spider QP01 – Bilder
Qytron Spider QP01 – Bilder
Qytron Spider QP01 – Bilder
Qytron Spider QP01 – Bilder

Qytron Spider QP01 – Bilder
Qytron Spider QP01 – Bilder

Qytron Spider QP01 – Bilder
Qytron Spider QP01 – Bilder

Qytron Spider QP01 – Bilder
Qytron Spider QP01 – Bilder

Installation: Kinderleicht und schnell
Die erste Inbetriebnahme ist in wenigen Minuten erledigt. Nach einer Ladezeit von 2,5 Stunden reicht ein Knopfdruck, um den Qytron Spider zu starten. Danach einfach ins Wasser „werfen“ und schon fährt er selbstständig los – keine App, keine Verbindung zum WLAN, keine weitere Einrichtung nötig. So einfach kann Poolreinigung sein.
Bedienung & Steuerung
Komfortabler geht es kaum: Am Gerät selbst gibt es nur den Einschalter. Der Roboter fährt nach dem Zufallsprinzip los und fährt so lange, bis der Akku (Laufzeit: rund 110 Minuten) leer ist. Dann bleibt er einfach am Beckengrund liegen, wo er sich mit dem Haken entnehmen lässt. Mehr Einstellungen gibt es nicht.
Navigation & Reinigung
Der Spider setzt auf eine rein zufällige Navigation. Beim Kontakt mit einer Wand oder Hindernissen ändert er die Richtung. Besonders in runden oder kleinen Pools werden so die meisten Bereiche zuverlässig erreicht. In eckigen oder großen Becken bleiben oft Flächen ungereinigt, da er kein systematisches Fahrmuster nutzt. Der Qytron Spider reinigt ausschließlich den Poolboden – Wände und die Wasserlinie bleiben außen vor. Grobe Verschmutzungen, Sand oder kleine Blätter nimmt er dabei gut auf. Der Filter ist groß genug und lässt sich in Sekunden leeren und auswaschen – ein echter Pluspunkt bei häufiger Nutzung.
Akku & Laufzeit
Der Hersteller gibt die Laufzeit mit 110 Minuten an, was im Praxistest überwiegend für einen Durchgang in kleineren Pools reicht. Ist der Akku leer, beendet der Spider die Reinigung und bleibt am Boden zurück. Nach 2,5 Stunden Ladezeit am Kabel ist er wieder einsatzbereit.
Preis
Der Qytron Spider QP01 kostet bei Banggood knapp 217 Euro. Am günstigsten ist er derzeit bei Amazon mit nur 151 Euro.
Fazit
Der Qytron Spider QP01 ist ein unkomplizierter, einfach zu bedienender Poolroboter, der nur für kleine und runde Pools empfehlenswert ist. Er punktet durch schnelle Einsatzbereitschaft, kabellosen Betrieb und einen einfach zu reinigenden Filter. In eckigen oder größeren Pools arbeitet er jedoch weniger zuverlässig und lässt gerne mal Stellen aus, da er nach dem Zufallsprinzip fährt. Für alle, die auf ausgefeilte Sensorik und praktische Apps verzichten können und eine günstige und praktische Lösung für den Alltag suchen, ist der Qytron Spider eine Option.
AGT PRR-85
Der Poolroboter AGT PRR-85 reinigt kleine bis mittelgroße Pools ohne ausgefeilte KI- oder App-Steuerung, dafür kostet er auch weniger. Wir haben ihn getestet.
- günstig & unkompliziert
- flott
- einfache Filtereinigung
- kompakt & leicht
- reinigt nur Boden
- Zufallsfahrt
- keine App, Zeitpläne und Fernbedienung
- in eckigen oder großen Becken wenig verlässlich
Poolroboter AGT PRR-85 im Test: Reinigt kleine und mittelgroße Pools für 150 €
Der Poolroboter AGT PRR-85 reinigt kleine bis mittelgroße Pools ohne ausgefeilte KI- oder App-Steuerung, dafür kostet er auch weniger. Wir haben ihn getestet.
Der Poolroboter AGT PRR-85 richtet sich an Poolbesitzer, die den Boden mit minimalem Aufwand sauber halten wollen. Optisch erinnert er an den Qytron Spider (Testbericht), fällt aber etwas größer aus und tritt in Weiß auf. Er verzichtet auf smarte Funktionen, flitzt direkt nach dem Start los und sammelt Schmutz im einfach zu leerenden Filterkorb. Im Test klären wir, für welche Becken der PRR-85 taugt – und wo seine Grenzen liegen.
Das Testgerät hat uns der Online-Shop Pearl zur Verfügung gestellt.
Design & Verarbeitung
Das flache, weiße Gehäuse wirkt aufgeräumt und funktional. Der PRR-85 setzt – wie sein günstiger Zwilling – auf einfache Räder statt Kettenantrieb oder aktive Rollenbürste. Das reduziert die Komplexität, senkt das Gewicht und erleichtert den Transport. Der mittige Filtereinsatz sitzt gut erreichbar unter der oberen Klappe; Griff und Dichtungen wirken stabil für die Preisklasse.
Poolroboter AGT PRR-85 – Bilder
AGT PRR-85 – Bilder

AGT PRR-85 – Bilder

AGT PRR-85 – Bilder

AGT PRR-85 – Bilder

AGT PRR-85 – Bilder

Installation
Auspacken, laden, ins Wasser setzen – mehr braucht es nicht. Der PRR-85 startet per Einschalter und legt ohne weitere Einrichtung los. Eine App, ein WLAN-Setup oder Zeitpläne fehlen. Das senkt die Hürde im Alltag, nimmt aber auch Komfort.
Bedienung & Steuerung
Die Steuerung beschränkt sich auf den Einschalter. Programme, Timer oder Leistungsstufen gibt es nicht. Läuft der Zyklus, bleibt der Roboter unterwegs, bis der Akku zur Neige geht oder der Nutzer ihn herausnimmt. Zur Entnahme taucht er nicht am Ende an der Wasseroberfläche auf. Dafür liegt ein Haken bei.
Navigation & Reinigung
Der PRR-85 fährt nach Zufallsprinzip: Wandkontakt, Richtungswechsel, weiter geht’s – flott und ohne Plan. In runden Becken erreichte er damit überraschend viel Fläche, in großen oder rechteckigen Pools blieben dagegen gerne Bereiche liegen. Er reinigt nur den Boden; die Wände und die Wasserlinie bearbeitet er nicht. Groben Schmutz, Sand und kleine Blätter nimmt er zuverlässig auf. Den Unterschied im Alltag macht der Filter: Er ließ sich binnen Sekunden entnehmen, ausleeren und ausspülen – ein echter Pluspunkt für die schnelle Pflege.
Akku & Laufzeit
Die Ausdauer reicht – je nach Beckengröße und Verschmutzung – für einen Durchlauf in kleinen bis mittleren Rundbecken. Für größere Becken startet man ihn besser zweimal nacheinander. Konkrete Zahlen variieren je nach Nutzung, weshalb wir auf Herstellerangaben verzichten.
Preis
Der PRR-85 zielt mit einem Preis von 150 Euro auf das untere Preisfeld der Akku-Bodenreiniger.
Fazit
Der AGT PRR-85 liefert einen schnellen Einstieg in die Poolpflege, solange der Anspruch klar bleibt: Bodenreinigung in kleinen, vorzugsweise runden Becken. Er punktet mit sofortiger Einsatzbereitschaft und einem sehr leicht zu reinigenden Filter. In großen oder eckigen Pools stört die Zufallsfahrt, weil Bereiche liegen bleiben – die Wände oder Wasserlinie ignoriert der Poolroboter komplett. Als günstiger „Bodenstaubsauger“ fürs Becken ist er okay, als Allrounder zu limitiert.











Künstliche Intelligenz
ITU: Netzbevölkerung wächst, digitale Kluften bleiben
Sechs Milliarden Menschen weltweit nutzen mittlerweile das Internet, das sind rund drei Viertel der Weltbevölkerung. Das teilte die Internationale Fernmeldeunion (ITU) am Montag in Genf mit. Vor einem Jahr waren es demnach noch 5,8 Milliarden Menschen.
Weiterlesen nach der Anzeige
Während die Netzbevölkerung langsam weiterwächst, bleiben im internationalen Vergleich wesentliche Unterschiede bei den Zugangsmöglichkeiten, betont die ITU. Das betrifft Bereiche wie den Ausbau von Infrastruktur und Preise für Anwender. Trotz der Fortschritte haben noch immer rund 2,2 Milliarden Menschen weltweit keinen Zugang zum Internet.
Erstmals erfasst der Bericht auch die über 5G angebundenen Nutzer. Laut ITU hat Europa mit einer 5G-Abdeckung von 74 Prozent die Nase vorn, gefolgt von Asien mit 70 Prozent und dem amerikanischen Kontinent mit 60 Prozent. In den Entwicklungsländern liegt diese Zahl teilweise bei gerade mal 4 Prozent.
Eine Frage des Geldes
Die Teilhabe am globalen Netz ist eine Frage des Geldes. In Ländern mit hohem Einkommen nähere man sich dem Ziel eines universellen Netzzugangs (94 Prozent online), schreibt die ITU. In den ärmsten Ländern haben dagegen nur 23 Prozent Zugang. Trotz teils höherer Wachstumserwartungen sei nicht damit zu rechnen, dass die digitale Kluft in absehbarer Zeit geschlossen werde.
In ärmeren Ländern bestehen in aller Regel unterschiedliche Zugangsmöglichkeiten zwischen Stadt und Land sowie Männern und Frauen. Den größten Unterschied zwischen den Geschlechtern vermerkt die ITU für die arabischen Länder. Dort nutzen nur 64 Prozent der Frauen das Netz im Vergleich zu 75 Prozent der Männer (Europa 93 Prozent versus 92 Prozent).
Die ITU hat ihre jährliche Bestandsaufnahme der globalen Telekommunikation zum Auftakt der World Telecom Development Conference (WTDC) am Montag in Baku veröffentlicht. Die WTDC will bis 28. November einen neuen //www.itu.int/en/mediacentre/Pages/PR-2025-11-17-WTDC-opening.aspx:Vierjahresplan für die Schließung digitaler Kluften weltweit verabschieden.
Weiterlesen nach der Anzeige
(vbr)
Künstliche Intelligenz
EU-Frequenzgruppe: Oberes 6-GHz-Band ist für 6G nötig, WLAN hat das Nachsehen
Die Radio Spectrum Policy Group (RSPG) hat am Montag ihre lange erwartete Empfehlung für die künftige Nutzung des oberen Teils des 6-GHz-Bandes (6425 bis 7125 MHz) in Europa veröffentlicht. Dieses Spektrum ist sehr begehrt, da es eine große „Datenautobahn“ darstellt, die sowohl für neue Mobilfunkstandards wie 6G als auch für leistungsstarke, drahtlose lokale Netzwerke (WLAN) dringend benötigt wird. Es ist der einzige verbleibende große Frequenzteil im mittleren Bereich, der für hohe Kapazitäten zur Verfügung steht.
Weiterlesen nach der Anzeige
Das Frequenz-Beratungsgremium der EU-Kommission versucht auf 28 Seiten, die Interessen des lizenzierten Mobilfunks und der unlizenzierten WLAN-Systeme auszugleichen. Zugleich will es bestehende Funkdienste, die diese Frequenzen aktuell nutzen, schützen. Kern der Empfehlung ist eine klare Aufteilung des Bandes, bei der jeder Seite ein eigener, vorrangiger Bereich zugewiesen wird.
Der obere Teil des Spektrums im Bereich 6585 bis 7125 MHz soll laut der RSPG vorrangig dem Mobilfunk zugeteilt werden. Mobilfunkbetreiber können diesen Bereich also nutzen, um ihre Netze auszubauen und neue Technologien wie 6G einzuführen. Die Experten sind aber auch dafür, dass WLAN-Systeme diesen Bereich potenziell mit in Anspruch nehmen dürfen – allerdings nur, wenn sie den Mobilfunk nicht stören.
Die RSPG plädiert in diesem Sinne für eine nicht-priorisierte Nutzung: Sollte der Mobilfunk den Platz benötigen, müsste WLAN zurückstehen. Die einzelnen Länder in Europa sollen auch selbst entscheiden dürfen, ob sie diese Mitnutzung durch solche drahtlosen Funknetze erlauben. 160 MHz könnten zudem möglicherweise von Ende 2027 an für WLAN freigegeben werden.
Scharfe Kritik von Verbänden
Den unteren Teil des Bandes (6425 bis 6585 MHz) sieht die Gruppe hauptsächlich als eine Art Schutzstreifen. Er soll verhindern, dass die Mobilfunksignale oder Signale aus dem oberen Teil des Bandes Aktivitäten im unteren Teil stören (5945 bis 6425 MHz), den die Kommission bereits für WLAN freigegeben hat. Ziel ist es, das vorhandene WLAN-Spektrum zu sichern.
Zusätzlich will die RSPG gewährleisten, dass wichtige bestehende Nutzer nicht beeinträchtigt werden. Dazu gehören Richtfunkstrecken von Unternehmen und staatlichen Stellen, Satellitenkommunikation sowie wissenschaftliche Anwendungen. Insbesondere soll ein kleines Teilband (6650 bis 6675.2 MHz) für die Radioastronomie erhalten bleiben, da dort wichtige Messungen zur Sternentstehung durchgeführt werden. Für Satelliten zur Erdbeobachtung, die in diesem Band Daten zur Meerestemperatur sammeln, sucht Europa langfristig nach Ausweichfrequenzen.
Weiterlesen nach der Anzeige
Die RSPG-Linie dient der Kommission als Empfehlung für die Festlegung verbindlicher Nutzungsbedingungen im Frequenzausschuss, die dann in den Mitgliedstaaten umgesetzt werden. Die Bundesregierung machte sich in dem Gremium entgegen eines Appells von Verbänden und Firmen aus der Breitband-, Energie- und Kommunalwirtschaft dafür stark, das gesamte obere 6-GHz-Frequenzband vorrangig dem Mobilfunk zuzuweisen.
Die Lobby-Gruppen Breko, BDEW und VKU fordern die Kommission jetzt auf, die Entscheidung der RSPG kritisch zu prüfen. Sie sollte demnach „im Interesse von Gesellschaft, Wirtschaft und Bildungseinrichtungen schon jetzt sicherstellen, dass einer lizenzfreien WLAN-Nutzung im oberen 6-GHz-Band 320 MHz zur Verfügung stehen“. Sonst könnte der neue Wi-Fi-7-Standard sein volles Potenzial nicht entfalten. Eine Mobilfunknutzung sei dagegen nur in Ballungsräumen sinnvoll umzusetzen.
(wpl)
Künstliche Intelligenz
Luna Halle: DLR probt die Suche nach Wassereis im Mondboden
Wenn Menschen künftig dauerhaft auf dem Mond präsent sein wollen, wird Wasser ein unabdingbarer Rohstoff sein: zum Trinken und, zerlegt in seine Bestandteile, als Lieferant für Atemluft und Treibstoff. Vorkommen von Wassereis auf dem Mond sind bereits nachgewiesen. Das Deutsche Zentrum für Luft- und Raumfahrt (DLR) erprobt nach eigenen Angaben bereits die Suche nach Eis unter der Oberfläche in der Mondhalle in Köln.
Weiterlesen nach der Anzeige
Das Mondzentrum Luna ist eine 700 Quadratmeter große und 9 Meter hohe Halle auf dem Gelände des DLR in Köln, in der Raumfahrtakteure Einsätze auf dem Mond trainieren können. Dazu ist die Halle mit einer bis zu 3 Meter dicken Schicht aus simuliertem Mondstaub, dem Regolith, bedeckt.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Training für die Raumfahrt: Besuch in der Mondhalle
„Wir haben darin eine große Plexiglas-Scheibe vergraben, die eine Radarsignatur für Wassereis hat“, erzählte Thomas Uhlig, Projektmanager der LUNA Halle, als heise online die Luna-Halle im Frühjahr besuchte. Im Rahmen der Polar Explorer Kampagne hat das Team von Nicole Schmitz vom DLR-Institut für Weltraumforschung mithilfe von zwei Rovern erfolgreich nach Wassereis – respektive der Plexiglas-Scheibe – im Mondboden gesucht und den Fund kartiert. Als Nächstes will das Team die Daten auswerten.
Zwei Rover im Einsatz
„Wenn wir Wassereis auf dem Mond finden und kartieren wollen, müssen wir auf der Oberfläche sehr beweglich sein. Deswegen hatten wir zwei Rover im Einsatz, die mit speziellen Instrumenten unterwegs waren“, erzählt Schmitz. „Die Kombination von unterschiedlichen Methoden bringt Vorteile und erwies sich auch hier als besonders zuverlässig.“
Zum Einsatz kam zum einen Radar, das den Kontrast zwischen Regolith und Plexiglas oder Eis erkennt. Daneben wurde ein seismisches Verfahren eingesetzt: Eine seismische Quelle (Portable Active Seismic Source, PASS) erzeugt Schwingungen im Boden. Diese verformen ein darin verlegtes Glasfaserkabel. Die winzigen Verformungen der Glasfaser lassen Schlüsse auf die Struktur des Untergrunds zu. Ein solches Kabel könnte auch auf dem Mond verlegt werden.
Weiterlesen nach der Anzeige

heise online/ wpl
)
Simulierter Mondstaub
Die Kölner Halle wird vom DLR und der Europäischen Weltraumorganisation (European Space Agency, ESA) betrieben. Die Landschaft stellt die Gegebenheiten am Südpol des Mondes dar, der als potenzieller Lande- und Siedlungsplatz in Frage kommt, mit simuliertem Mondstaub und der extremen Lichtsituation. In einer weiteren Ausbaustufe soll ab dem kommenden Jahr auch ein System installiert werden, das die verminderte Schwerkraft auf dem Mond simuliert.
„Wir wollen für Europa, für die Industrie, für Astronauten, und Forschungsinstitutionen die Möglichkeit bieten, witterungsunabhängig in einem Gebäude unter reproduzierbaren Bedingungen zu trainieren“, sagte Uhlig heise online. Die Halle steht aber auch Nicht-Europäern offen: Das japanische Raumfahrtunternehmen iSpace etwa bereitete dort seine letztlich gescheiterte Mondlandung vor.
(wpl)

ITU: Netzbevölkerung wächst, digitale Kluften bleiben

Top500 November 2025: Deutschland hat den ersten Exascale-Computer Europas

EU-Frequenzgruppe: Oberes 6-GHz-Band ist für 6G nötig, WLAN hat das Nachsehen
-

 UX/UI & Webdesignvor 3 Monaten
UX/UI & Webdesignvor 3 MonatenDer ultimative Guide für eine unvergessliche Customer Experience
-

 UX/UI & Webdesignvor 3 Monaten
UX/UI & Webdesignvor 3 MonatenAdobe Firefly Boards › PAGE online
-

 Apps & Mobile Entwicklungvor 3 Monaten
Apps & Mobile Entwicklungvor 3 MonatenGalaxy Tab S10 Lite: Günstiger Einstieg in Samsungs Premium-Tablets
-

 Datenschutz & Sicherheitvor 3 Monaten
Datenschutz & Sicherheitvor 3 MonatenHarte Zeiten für den demokratischen Rechtsstaat
-
eine gute Nachricht ist")
eine gute Nachricht ist") Social Mediavor 3 Monaten
Social Mediavor 3 MonatenRelatable, relevant, viral? Wer heute auf Social Media zum Vorbild wird – und warum das für Marken (k)eine gute Nachricht ist
-

 UX/UI & Webdesignvor 1 Monat
UX/UI & Webdesignvor 1 MonatIllustrierte Reise nach New York City › PAGE online
-

 Datenschutz & Sicherheitvor 2 Monaten
Datenschutz & Sicherheitvor 2 MonatenJetzt patchen! Erneut Attacken auf SonicWall-Firewalls beobachtet
-

 Online Marketing & SEOvor 3 Monaten
Online Marketing & SEOvor 3 Monaten„Buongiorno Brad“: Warum Brad Pitt für seinen Werbejob bei De’Longhi Italienisch büffeln muss