Künstliche Intelligenz
30 Jahre „Duke Nukem 3D“: Warum der Kult-Shooter auch heute noch Spaß macht
Als die Sharewarefassung von „Duke Nukem 3D“ im Januar 1996 erschien (die Vollversion folgte im April), war die Welt der Ego-Shooter noch überschaubar. id Software hatte mit „Wolfenstein 3D“ (1992) und „Doom“ (1993) das Genre erschaffen und dominiert. Die Konkurrenz witterte das große Geld und kippte in den nachfolgenden Jahren oftmals uninspirierte „me too“-Ware auf den Markt, die in der damaligen Spielepresse meist als „Doom-Klone“ zusammengefasst wurde.
Weiterlesen nach der Anzeige
Es gab allerdings einige Spiele, die aus der seelenlosen Masse herausstechen – Spiele wie LucasArts’ 1995er „Star Wars: Dark Forces“, das sich Mühe gab, das Shooter-Einerlei mit interessant gestalteten Missionen, einer spannenden Rahmenhandlung und mehr Verspieltheit aufzuhübschen. Und dann kam 3DRealms mit „Duke Nukem 3D“ um die Ecke und zeigte, dass Shooter auch einfach nur komplett wahnsinnig sein dürfen. Denn der Duke war sehr anders als die Space Marines dieser Welt: lauter, witziger und mit einer geradezu anarchischen Lust an der Grenzüberschreitung.
Die Geburt des Antihelden
Die Figur des Duke Nukem war keine Erfindung der Ego-Shooter-Ära. Genau genommen entspringt sie der Welt der Jump-n-Runs: Nachdem id Software Ende 1990 mit „Commander Keen“ bewiesen hatte, dass schnelle Plattformer im Konsolenstil auch auf den damals noch sehr behäbigen MS-DOS-PCs machbar waren, folgten dieser Innovation schnell Nachahmer. Unter anderem das von Todd Replogle entwickelte und im Sommer 1991 unter Apogee veröffentlichte „Duke Nukem“, das Ende 1993 noch einen sehr ähnlich gelagerten zweiten Teil erhalten sollte. Beide drehten sich um einen blonden Muskelprotz mit dicker Knarre, beide waren unterhaltsame Spiele, und beide verkauften sich sehr gut.
Für den dritten Teil aber hatten Replogle und sein Team deutlich ambitioniertere Pläne: Das Ganze sollte schnell sein, bunt, interaktiv, laut, krachend, komplett over the top – und vor allem 3D.
Technik als Erlebnis
Schon nach kurzer Suche landeten die Entwickler bei der „Build“-Engine, die aus den Händen des Teenagers Ken Silverman stammte. Der enthusiastische junge Coder hatte 1993 bereits „Ken’s Labyrinth“ veröffentlicht, einen netten Fantasy-Shooter mit für damalige Verhältnisse guter Grafik und vor allem interaktiven Elementen in den Wandtexturen. Gerade dieser Aspekt machte den Programmierer für 3DRealms interessant, die die gerade noch in Arbeit befindliche neue 3D-Engine namens „Build“ für „Duke Nukem 3D“ lizenzierten.

heise medien
)
Die Entwicklung des Spiels dauerte eine ganze Weile, insgesamt war „Duke Nukem 3D“ etwa zwei Jahre lang in Arbeit. Ken arbeitete die ganze Zeit über an Verbesserungen im Build-System, eine frühe (und deutlich weniger ausgereifte) Fassung der Engine kommt in den beiden Capstone-Shootern „Witchaven“ und „William Shatner’s TekWar“ zum Einsatz. Aber erst „Duke Nukem 3D“ machte Build wirklich bekannt, und der Hauptgrund dafür war die Interaktivität: Damals waren Ego-Shooter im Großen und Ganzen noch statisch. Klar, es gab immer wieder mal bedienbare Schalter oder Türen, aber die Levels an sich waren fix, sie veränderten sich nicht, und es gab in ihnen in aller Regel nichts zu tun, außer Gegner zu erledigen.
Weiterlesen nach der Anzeige
Mit „Duke Nukem 3D“ änderte sich das: Umlegbare Schalter wechseln die Beleuchtung von einzelnen Abschnitten, bestimmte Wände, Fensterscheiben und sogar ganze Levelteile lassen sich zerstören, überall laden benutzbare Objekte zum Drücken der „Benutzen“-Taste ein. Duke darf sich an Toiletten entleeren (begleitet von einem erleichterten „Ahhh… much better.“), an Wasserspendern erfrischen, Telefone benutzen, den Echtzeit-Video-Feed von Überwachungskameras einsehen oder in einem Karaoke-Club „Boooorn to be wihihihiiiild.“ grölen. Im zweiten Level „Red Light District“ steht ein Billardtisch herum, dessen Bälle man durch die Gegend klicken lassen darf, mit auf einer simplen Physikengine basierenden Resultaten. Das war für das Jahr 1996 mächtig beeindruckend.
Alles so schön hoch hier.
Genau wie die ausgeprägte Vertikalität der Levels. Shooter der Generation „Wolfenstein 3D“ fanden ausschließlich auf einer Ebene statt. „Doom“ und seinesgleichen gaukelten zwar Höhenunterschiede vor, was aber nur mit Tricks möglich war – übereinander liegende Sektoren waren da technisch nicht möglich. Das änderte sich erst mit „Star Wars: Dark Forces“, und „Duke Nukem 3D“ setzte nochmal einen obendrauf: Das Spiel beginnt auf einem Hausdach, von dem man herunterspringt, viele Treppen sorgen für Höhenunterschiede, teilweise finden ganze Levels auf vielen verschiedenen Ebenen statt, mit Schluchten, Hängebrücken und schrägen Wänden.
Trotz aller technischer Innovation war aber auch „Duke Nukem 3D“ noch ein typisches 2.5D-Spiel, dessen Levels auf zweidimensionalen Sektoren basieren und dessen Figuren platte Sprites nutzen – die Ära der auf Polygonberechnung basierenden echten 3D-Shooter begann erst später im Jahr mit der Veröffentlichung von id Softwares „Quake“.
Lesen Sie auch
Genau wie zu Hause
Ein weiteres hervorstechendes Merkmal von „Duke Nukem 3D“ war der angedeutete Realismus der Levelgestaltung. „Doom“ und seinesgleichen spielten zum großen Teil in abstrakten Szenarien wie der Hölle, was vor allem technische Gründe hatte: Die Limitierungen der 3D-Engine erlaubten keine glaubwürdig aufgebauten Echtwelt-Szenarien, wie man gut an den extrem simplen Stadtlevels aus „Doom 2“ sieht.
„Duke Nukem 3D“ dagegen schöpfte mit vollen Händen aus dem Realismusbottich. Die Spieler rennen und schießen sich durch Hochhausschluchten, Kinos, Bars, Polizeistationen und Nachtclubs, U-Bahnen fahren durch die Levels. Es gibt sogar Spiegel, die nicht nur den Raum mit all seinen Inhalten reflektieren, sondern auch den pixeligen Duke selbst – der sein Spiegelbild mit „Damn, I’m looking good.“ kommentiert. Allerdings war „Duke Nukem 3D“ nicht das erste Spiel, das dieses Sensationsfeature bot – das wenige Monate zuvor veröffentlichte „William Shatner’s TekWar“ zeigte auch schon Spiegel.
Natürlich muss man das Wort „Realismus“ mit 30 Jahren Abstand und einer entsprechenden Menge an Skepsis betrachten. Aber das, was in „Duke Nukem 3D“ zu sehen war, war für das Jahr 1996 schlicht revolutionär.












Künstliche Intelligenz
NAND-Modul im Studio Display 2026 und XDR: Apple gibt reichhaltig
Besitzer des neuen Studio Display 2026 sowie Studio Display XDR dürfen sich über einen kleinen Bonus freuen: Das darin verbaute, iOS-basierte SoC wurde aufgerüstet – und dabei auch gleich das NAND-Modul. Statt dem veralteten A13 Bionic aus dem iPhone 11 stecken nun A19 (Studio Display 2026) und A19 Pro (Studio Display XDR) in den Geräten. Gleichzeitig wurde das integrierte Flash-Modul von 64 auf 128 GByte vergrößert, wie Macrumors unter Bezug auf Mr. Macintosh meldet.
Weiterlesen nach der Anzeige
Studio Display schlägt MacBook Neo
Beim A19 beziehungsweise A19 Pro handelt es sich um Apples neueste iPhone-Chips. Sie stecken im iPhone 17 und 17e (A19) sowie im iPhone 17 Pro, 17 Pro Max und Air (A19 Pro). Damit „schlagen“ beide Studio Displays zudem das MacBook Neo, in dem nur ein A18 Pro steckt, dort allerdings mit minimal 256 GByte großem NAND-Modul. Unklar bleibt, wie viel RAM die SoCs mitbringen. Beim A19 sind aus Apples Regal 8 GByte üblich, beim A19 Pro 12 GByte – letzteres wären 4 GByte mehr als beim Neo.
Das SoC hat in den Bildschirmen mehrere Aufgaben. Es hilft etwa beim USB- und Thunderbolt-5-Gerätemanagement, bei der Umsetzung von 3D-Audio über die Lautsprecher, der Ansteuerung und Verarbeitung der Webcam-Signale sowie bei der Farbwiedergabe und womöglich auch beim neu integrierten Adaptive Sync im Studio Display XDR. Für den Nutzer erfolgt dies alles versteckt, es wird zwar regelmäßig eine neue Firmware eingespielt, als iOS-Gerät nutzen kann er das SoC aber nicht.
Die Frage nach dem großen NAND
Unklar bleibt, warum Apple ein derart großes NAND-Modul in den Studio Displays verbaut – voll ausgenutzt werden dürfte dieses in der Praxis wohl kaum. Denkbar ist, dass es den A19 und A19 Pro jedoch nur noch mit 128 GByte NAND in Minimalausstattung gibt und Apple schlicht keine Varianten mit nur 64 GByte mehr produzieren lässt. Die Marge dürfte das kaum schmälern, die Studio Displays sind mit minimal 1699 Euro (Studio Display 2026) respektive 3499 Euro (Studio Display XDR) schließlich auch preislich Oberklasse.
Käufer sollten wie bereits berichtet beachten, dass beide Monitore nicht an Intel-Macs zu betreiben sind. Außerdem ist die erhöhte Bildwiederholfrequenz von 120 Hertz nicht an Macs mit M1, M1 Pro, M1 Max, M1 Ultra, M2 und M3 nutzbar. Bei diesen Maschinen bleibt es bei 60 Hertz. Mit dem iPad Pro M5 gibt es zudem nur ein Apple-Tablet, das das Studio Display XDR mit 120 Hertz ansteuern kann.
Weiterlesen nach der Anzeige
(bsc)
Künstliche Intelligenz
Gimp 3.2 erschienen: Das ändert sich für Designer und Pixel-Künstler
Das Gimp-Team hat Version 3.2 der freien Bildbearbeitungssoftware veröffentlicht – ein Jahr nach dem großen Versionssprung auf Gimp 3.0, der eine siebenjährige Entwicklungszeit beendete. Im Mittelpunkt des neuen Release stehen nicht-destruktive Ebenentypen. Bereits mit GIMP 3.0 wurden nicht-destruktive Filter eingeführt, die den Arbeitsablauf grundlegend verändern sollen.
Weiterlesen nach der Anzeige
Wie das Projekt in seiner Release-Ankündigung erläutert, war der Hauptfokus des Projektplans für 3.2 das Konzept „non-destructive layers“. Zwei neue Ebenentypen plus erweiterte Text-Layer setzen dies um, jeweils mit einem Rasterize/Revert-Mechanismus, der versehentliche destruktive Bearbeitungen rückgängig machen kann.
Vektorebenen statt rasterisierter Pfade
Die neuen Vector Layers unterscheiden sich grundlegend von den bisherigen Pfaden in Gimp. Während Pfade bislang separate Objekte waren, deren Stroke-Ergebnis sofort rasterisiert wurde, handelt es sich bei Vector Layers um vollwertige Ebenen mit vektoriellen Eigenschaften. Sie lassen sich nicht-destruktiv skalieren, rotieren und per Drag & Drop mit neuen Füllungen versehen – Änderungen am Pfad aktualisieren die Darstellung automatisch. Das eröffnet auch neue Exportmöglichkeiten: Gimp kann Vector Layers und Textebenen erstmals als echte Vektoren in SVG-Dateien exportieren, wobei Rasterebenen optional als PNG oder JPEG eingebettet werden. Auch der PDF-Export wurde um Vektoroptionen erweitert, sodass die Ebenen in anderer Vektorsoftware editierbar bleiben.
Für Pixel-Art-Künstler dürfte der neue Overwrite-Paint-Modus besonders interessant sein. Im Gegensatz zum herkömmlichen Malen, bei dem transparente Pixel per Alpha-Blending verrechnet werden, ersetzt der Overwrite-Modus Pixel direkt, ohne die Transparenzwerte zu mischen. Das verhindert störende Opazitäts-Artefakte, die beim wiederholten Übermalen teiltransparenter Bereiche entstehen – ein häufiges Ärgernis etwa beim Arbeiten mit dem Pencil Tool.
Bedienoberfläche und MyPaint-Pinsel überarbeitet
Gimp 3.2 bringt auch diverse Verbesserungen an der Oberfläche. Bilder lassen sich nun im Single-Window-Modus per Drag & Drop auf die Tab-Leiste ziehen. Thumbnails für Pinsel, Schriften und Paletten passen sich über Theme Colors besser an dunkle Themes an, was störende Helligkeitskontraste reduziert. Ein neues „System“-Farbschema übernimmt automatisch die Designsprache des Betriebssystems. Der On-Canvas-Texteditor unterstützt jetzt Drag & Drop zum Verschieben, Tastenkürzel wie Strg+B für Fett und Strg+I für Kursiv sowie eine Live-Vorschau bei Farbänderungen. Hinzu kommen Outline-Optionen für Text in den Varianten inner, centered und outer.
Weiterlesen nach der Anzeige
Die MyPaint-Pinsel wurden auf die Version-2-API aktualisiert. 20 neue Pinsel sind hinzugekommen, darunter ein Pfeilpinsel. Die Pinsel berücksichtigen nun Canvas-Zoom und -Rotation sowie die Barrel-Rotation von Grafiktabletts. Ein neuer Gain-Regler erlaubt die Feinjustierung der Druckempfindlichkeit.
Mehr Möglichkeiten für Plug-in-Entwickler
Entwickler profitieren vom neuen GEGL (Generic Graphics Library) Filter Browser, der im Stil des Procedure Browsers alle verfügbaren GEGL-Operationen mit Parametern, Typen und Beschreibungen auflistet. Das erleichtert die Integration nicht-destruktiver Filter in Skripte und Plug-ins erheblich – insbesondere für GEGL-Filter von Drittanbietern. Insgesamt kamen 111 neue libgimp-Funktionen und 14 neue libgimpui-Funktionen hinzu, während 24 ältere Schnittstellen als veraltet markiert wurden.
Nicht-destruktive Filter funktionieren jetzt auch auf Kanälen, den neuen Ebenentypen und Ebenengruppen. Letztere unterstützen einen Pass-Through-Modus, der Adjustment-Layer-ähnliche Arbeitsabläufe ermöglicht. Ein neuer Vibrance-Filter ergänzt die Filtersammlung.
Weiterhin importiert Gimp 3.2 weitere Formate wie APNG, AVCI, PVR und TIM sowie Paletten aus Procreate und Krita. Der Export unterstützt unter anderem DDS BC7, PSB und JPEG 2000. Photoshop-Kompatibilität wurde durch Import von Layer-Styles wie Schlagschatten sowie Unterstützung für .pat-, .acv- und .alv-Dateien verbessert.
Gimp 3.2 steht für Windows (auch im Microsoft Store), macOS und Linux (Flatpak, AppImage, Snap) bereit. Ab dieser Version entfallen 32-Bit-Windows-Binaries. Die vollständigen Release Notes listen sämtliche Änderungen auf.
Lesen Sie auch
(vza)
Künstliche Intelligenz
Ecovacs Winbot W3 Omni im Test: Fensterputzroboter wäscht sein Wischtuch selbst
Der Ecovacs Winbot W3 Omni bringt als erster Fensterputzroboter eine integrierte Waschmaschine für das Wischtuch mit.
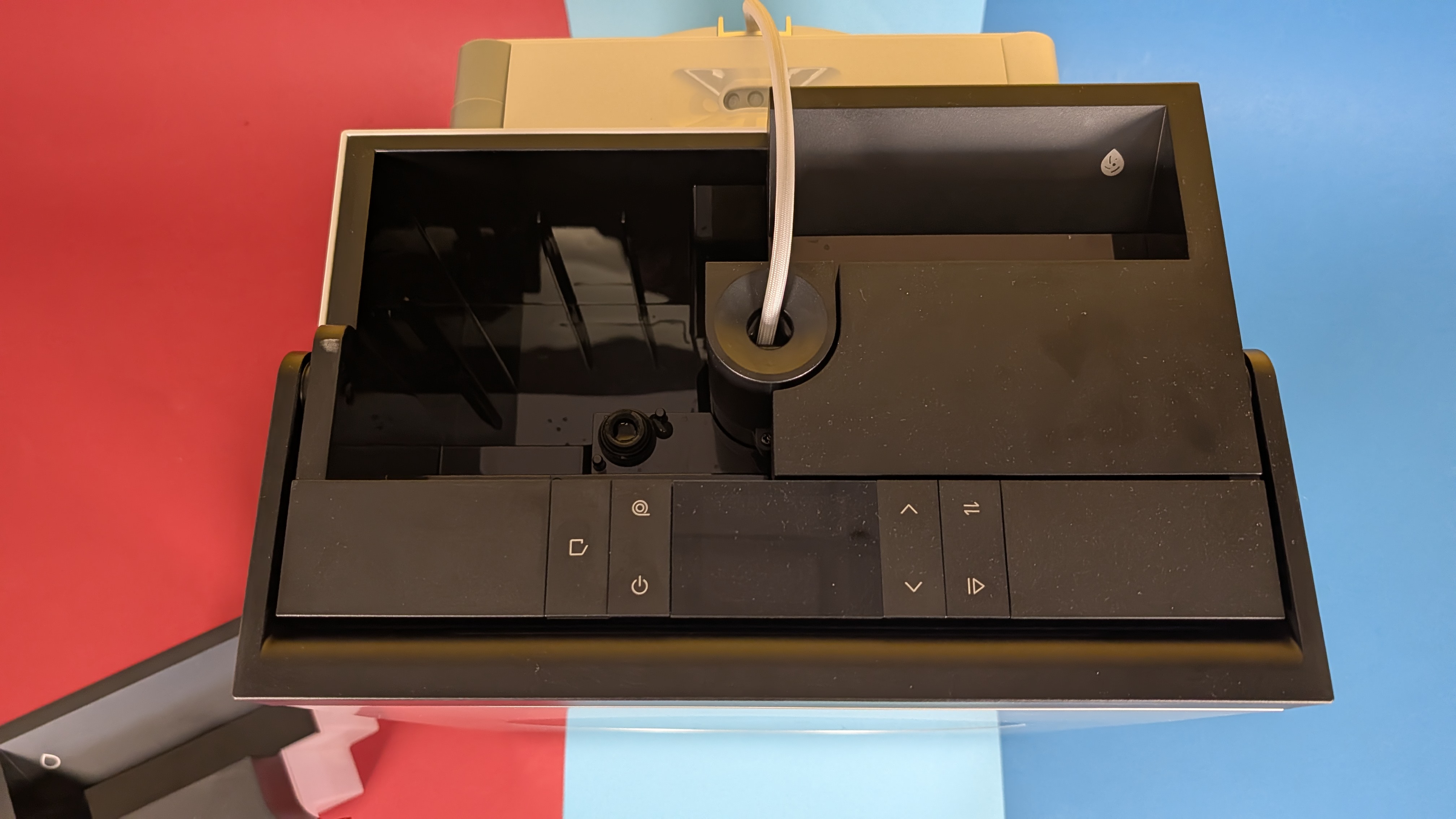
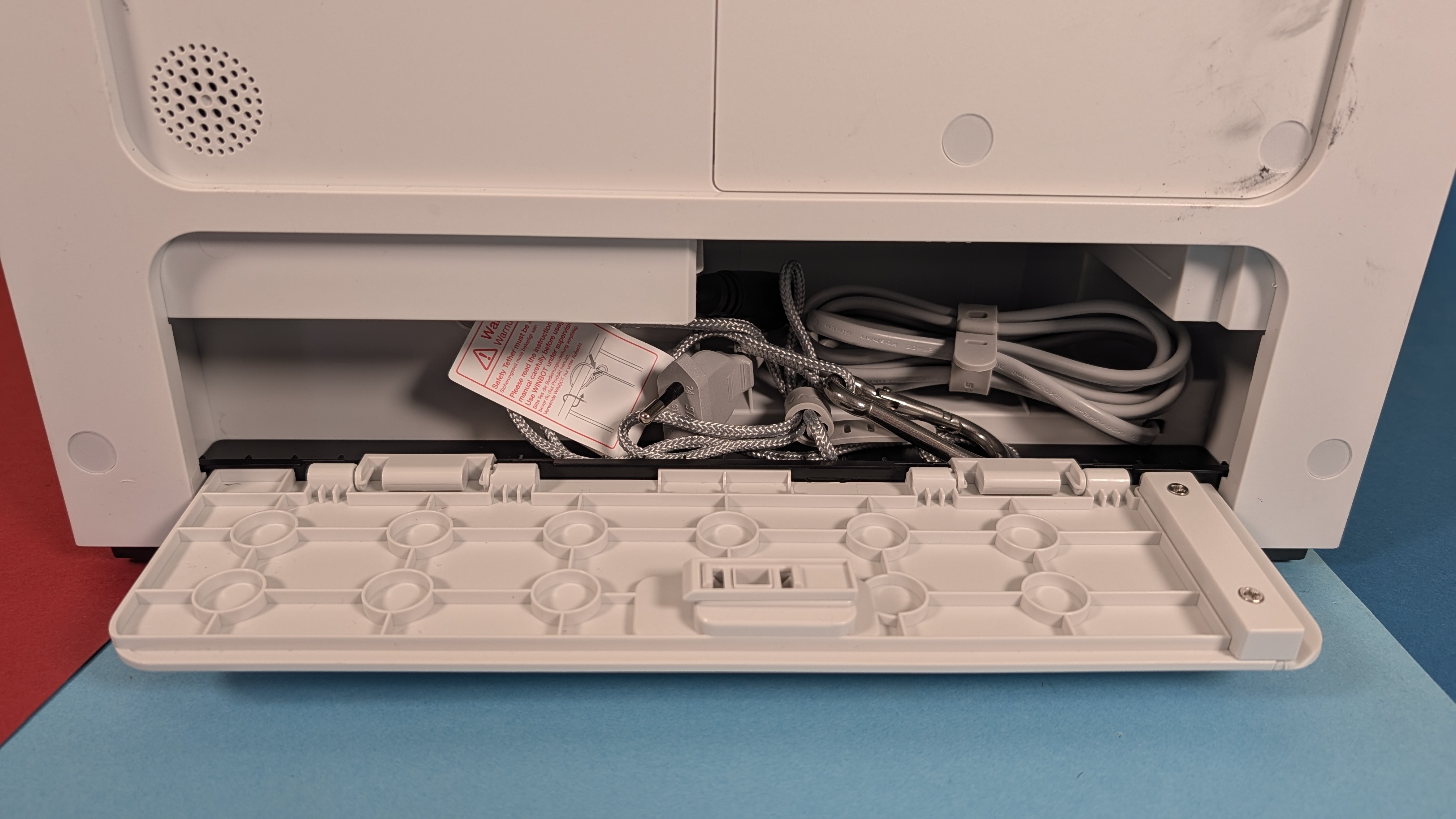
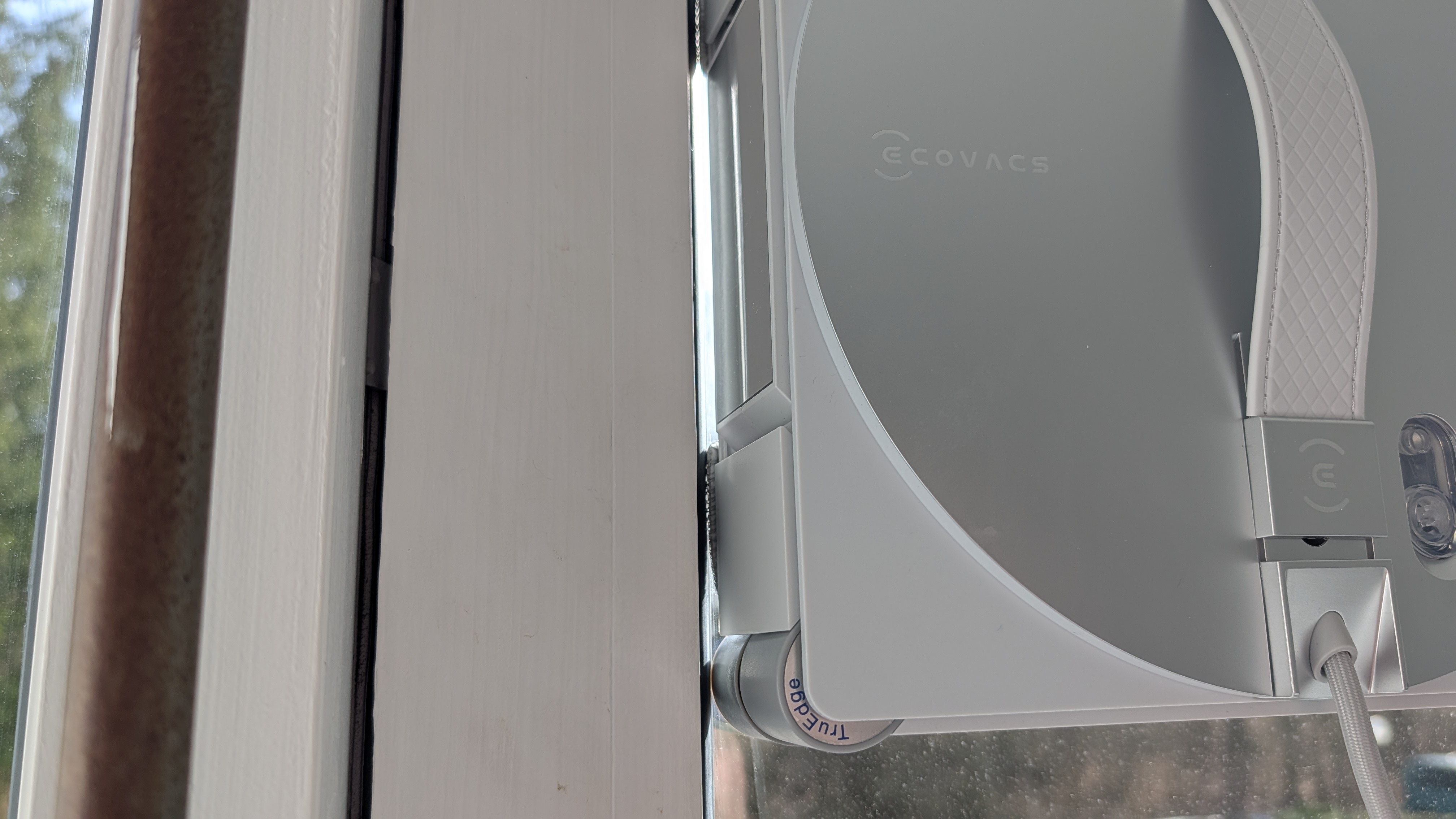
Ecovacs setzt beim neuen Winbot W3 Omni auf ein komplett überarbeitetes Stationskonzept. Die bekannte kofferartige Basis dient nicht mehr nur als Akku, Aufbewahrung und Sicherungsanker – sie ist jetzt auch eine Waschmaschine für das Wischtuch. Damit entfällt das lästige Auswaschen per Hand zwischen den Fenstern.
Der Preis für diesen Komfortgewinn: Die Station hat sich im Gewicht gegenüber dem Vorgänger W2S Omni (Testbericht) verdoppelt und der Roboter hängt nun an einem Haken außen am Koffer statt geschützt im Inneren. Dazu ruft Ecovacs mit 699 Euro einen deutlich höheren Startpreis auf. Ob die neue Waschfunktion und die bewährten Kantenschrubber den Aufpreis rechtfertigen, klären wir im Test. Das Testgerät hat uns der Hersteller zur Verfügung gestellt.
Design: Wie gut ist die Verarbeitung des Ecovacs Winbot W3 Omni?
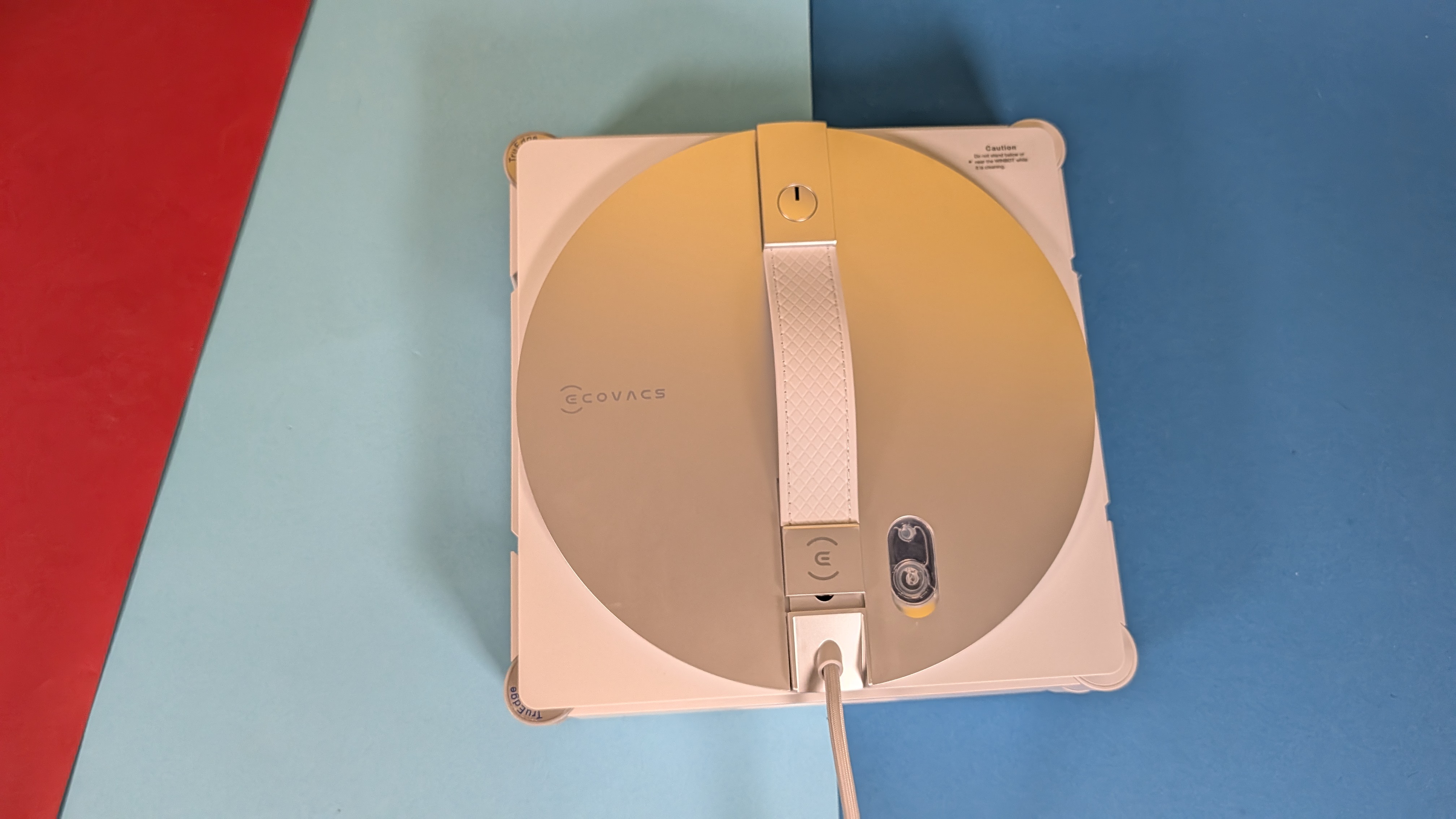
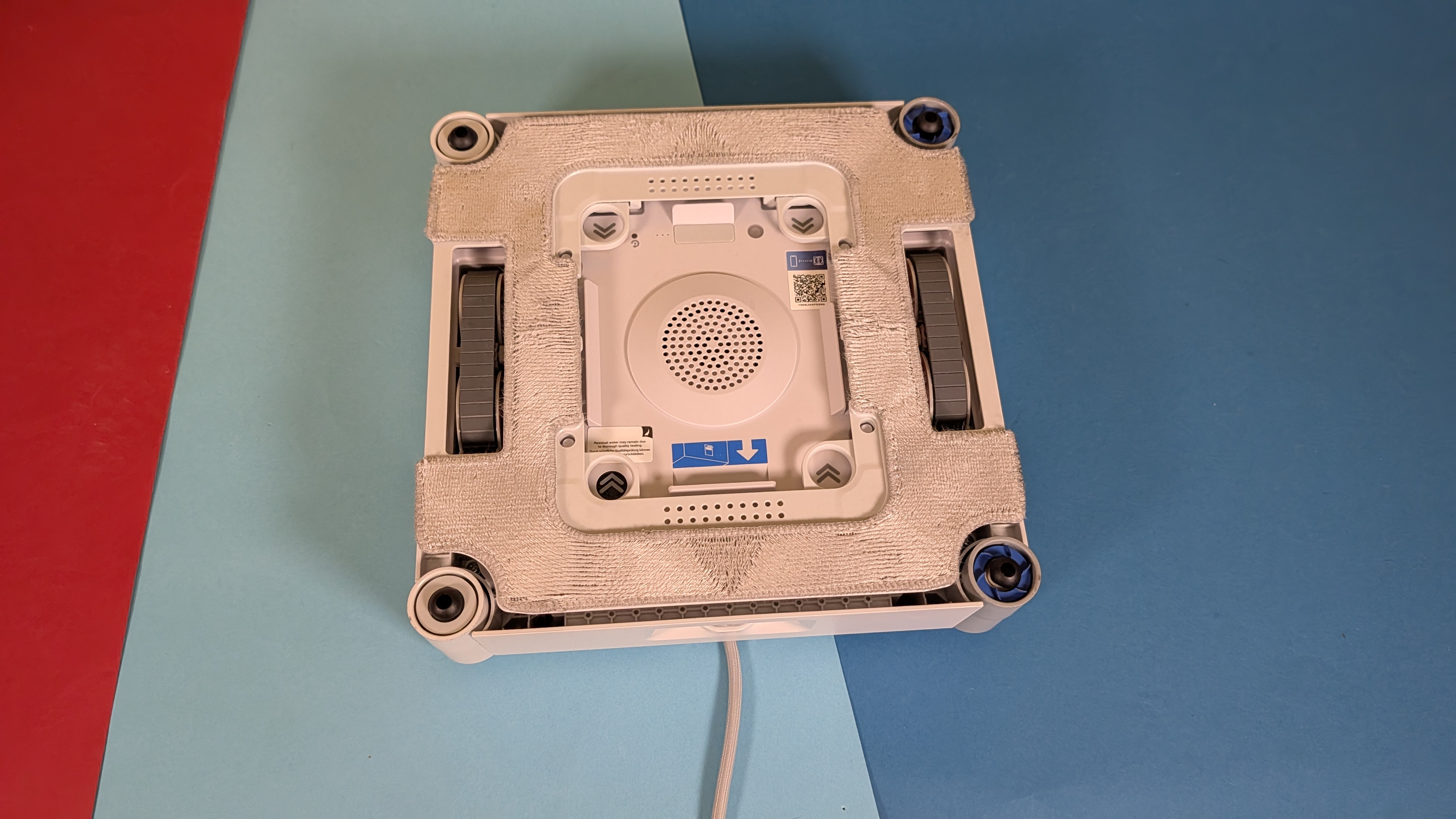
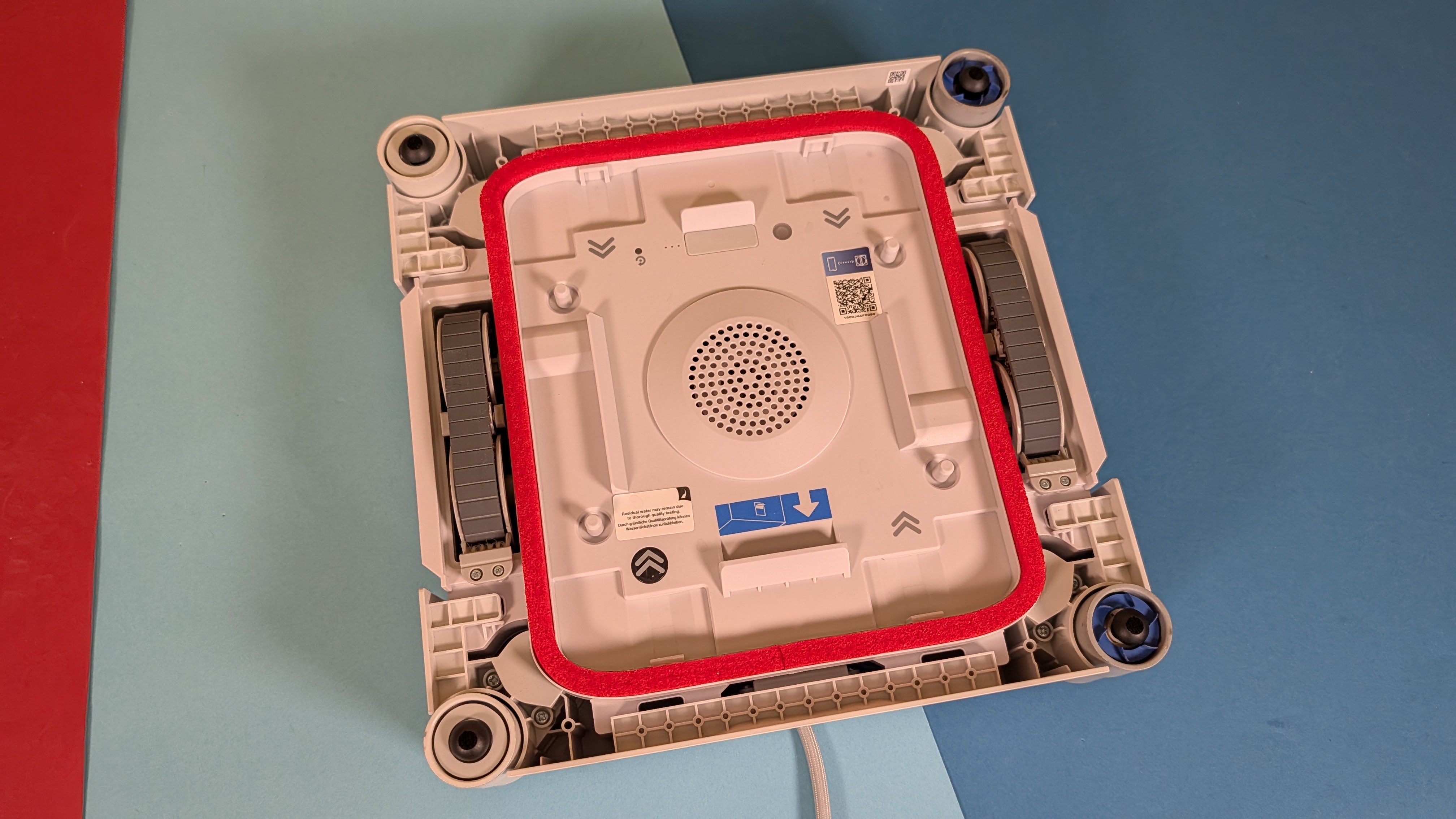
Der Roboter selbst misst 270 × 270 × 76 mm und wiegt 2,1 kg. Er ist in Weiß, Silber und Schwarz gehalten. Die Verarbeitung ist insgesamt solide, wenngleich Details wie die Kantenstoßsensoren etwas hochwertiger ausfallen könnten. Das Wischtuch sitzt auf einem Kunststoffrahmen, der per Klippmechanismus auf den Roboter gesetzt wird. Zum Lösen zieht man an vier Ösen. Das funktioniert unkompliziert. Unter einer Gummikappe sitzt der interne Wassertank mit 80 ml Fassungsvermögen. An den Seiten befinden sich zwei Sprühöffnungen, über die der Roboter Reinigungsflüssigkeit als feinen Nebel direkt auf die Scheibe sprüht – wie schon bei den Vorgängern.
Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke

Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke
Ecovacs Winbot W3 Omni – Bilderstrecke
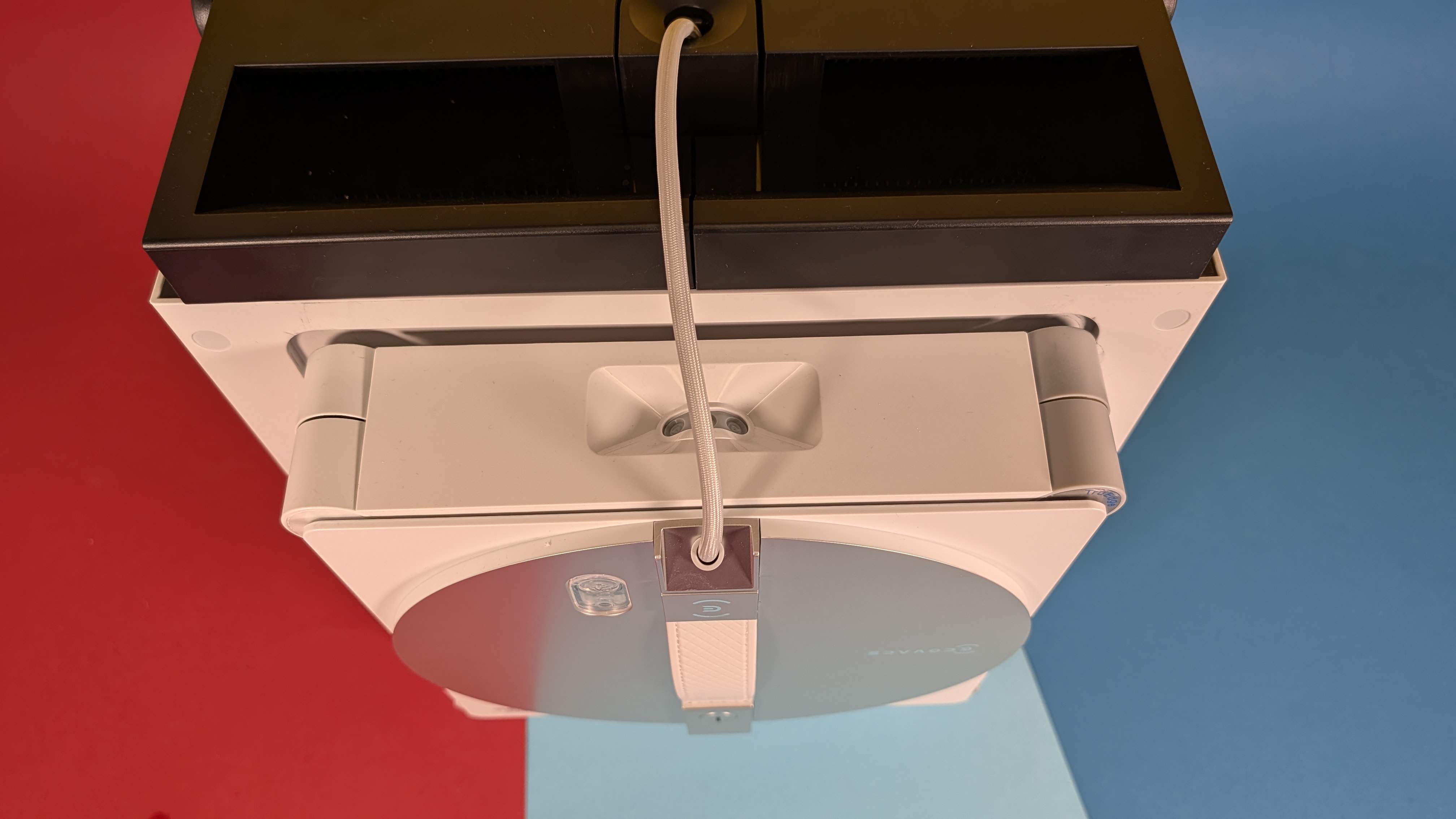
Die kofferartige Station fällt deutlich größer und schwerer aus als beim Vorgänger. Ohne Wasser und Roboter wiegt sie rund 10 kg, mit Roboter und befüllten Tanks erreicht das Gesamtpaket etwa 14 bis 15 kg. Das ist eine Verdopplung gegenüber dem Vorgänger W2S Omni, dessen Station mit Roboter knapp 7 kg wiegt. Da man die Station zum jeweiligen Fenster tragen muss, ist das spürbar unangenehm.
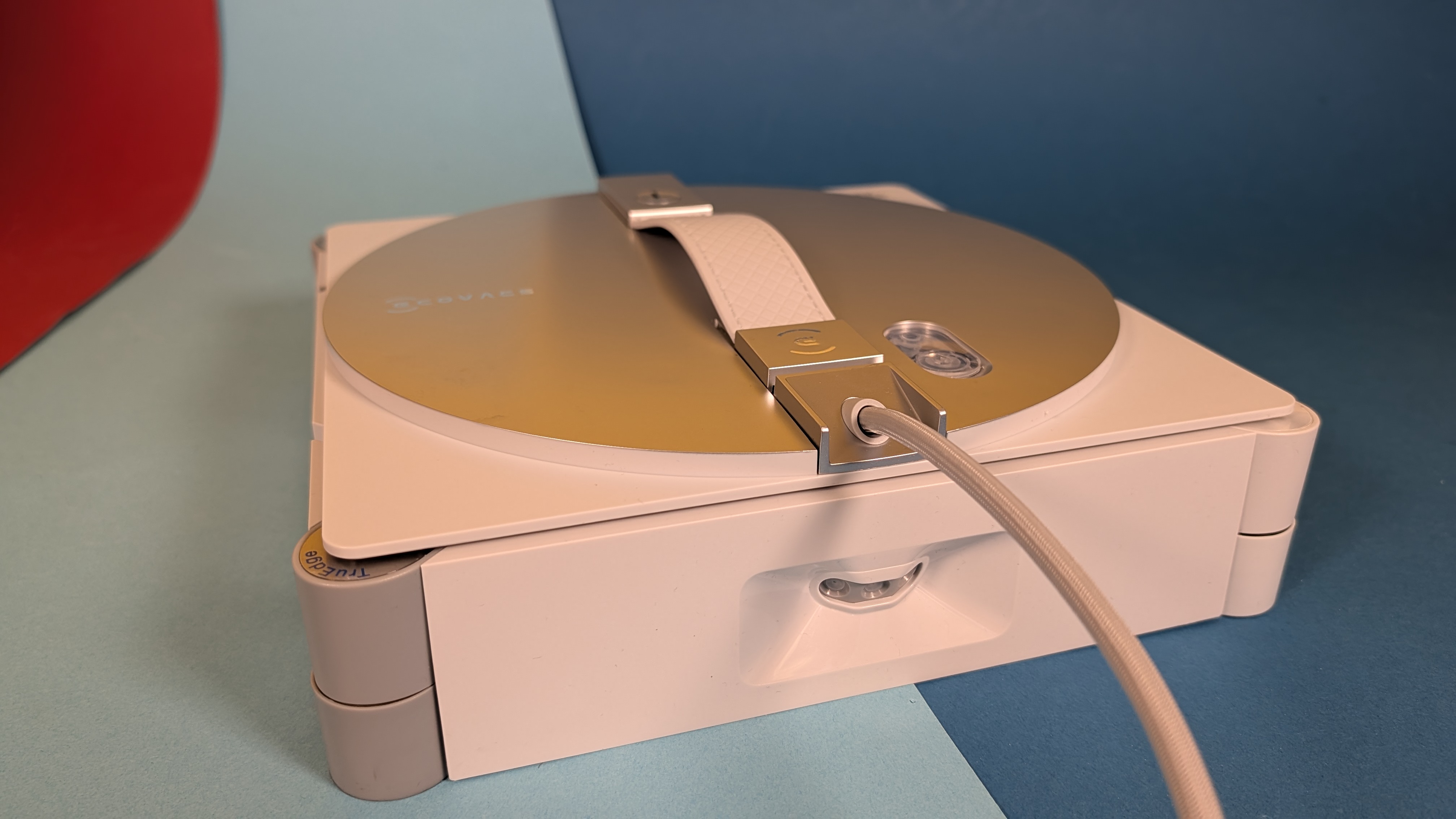
Optisch wirkt die Station weniger aufgeräumt als bei den Vorgängern. Dass der Roboter nun an einem Haken außen am Koffer statt geschützt im Inneren hängt, fühlt sich wackelig an. Der Vorgang des Einhakens ist nicht immer eingängig – wir setzen ihn im Test mehrfach daneben. Zudem ist der Roboter so exponierter und kann beim Transport leichter herunterfallen oder irgendwo hängen bleiben. Es wirkt, als hätte der Hersteller erst nach dem Abschluss des Designprozesses bemerkt, dass der Roboter noch einen Platz benötigt – und die Aufbewahrung des Roboters erst nachträglich hinzugefügt, nachdem die Wascheinheit den bisherigen Platz im Inneren eingenommen hat.
Einrichtung: Wie schnell ist der Ecovacs Winbot W3 Omni betriebsbereit?
Die Inbetriebnahme gelingt ohne große Hürden: Station aufstellen, das 5,5 m lange Stromkabel anschließen und den Frischwassertank auffüllen. Das Verbindungskabel zwischen Roboter und Station dient nicht nur als Sicherungsseil, sondern auch gleichzeitig als Stromversorgung, da der Roboter seinen Strom über die Station bezieht. Diese enthält einen Akku, womit man am Fenster unabhängig von Steckdosen bleibt. Ein Saugnapf am Unterboden der Station fixiert diese zusätzlich.
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung

Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung

Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung

Ecovacs Winbot W3 Omni – App & Einrichtung

Ecovacs Winbot W3 Omni – App & Einrichtung
Ecovacs Winbot W3 Omni – App & Einrichtung
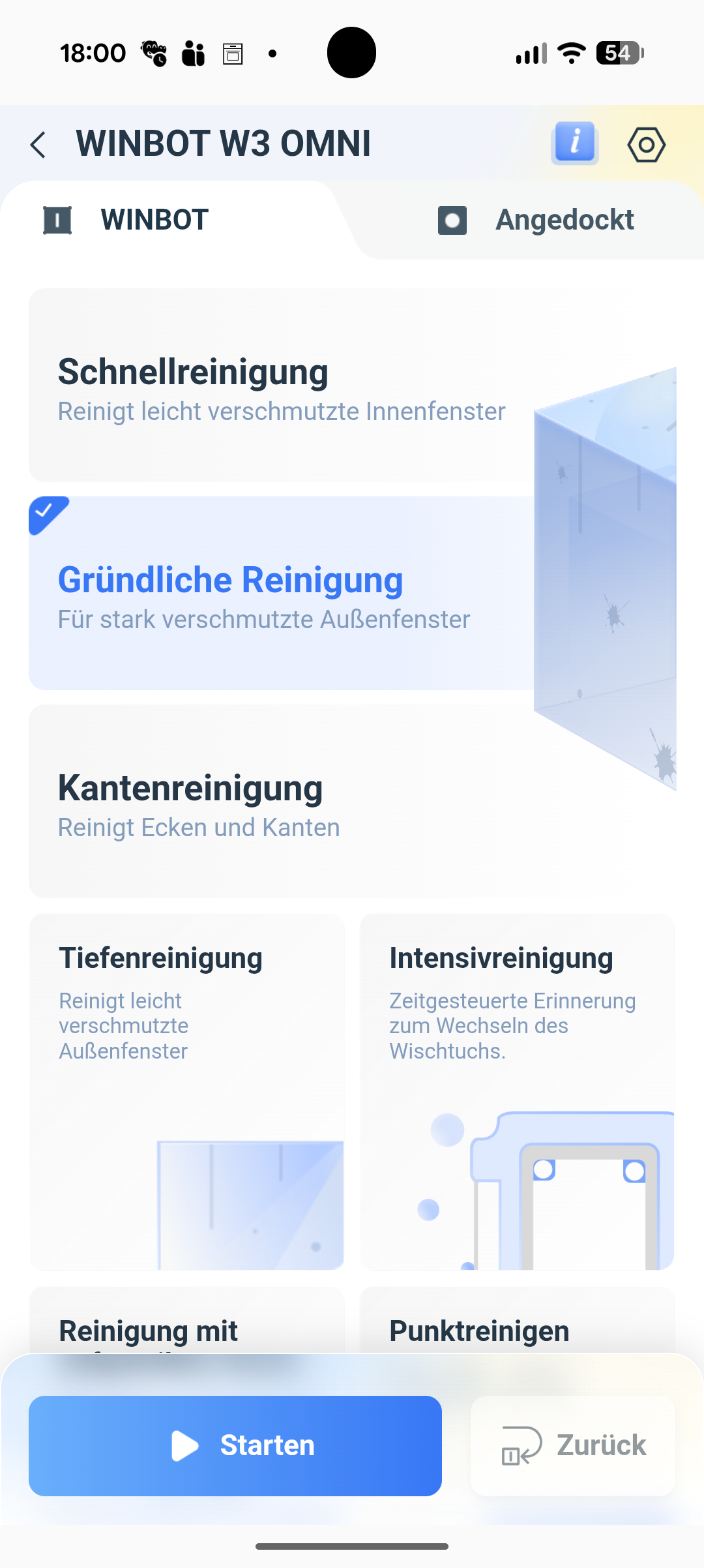
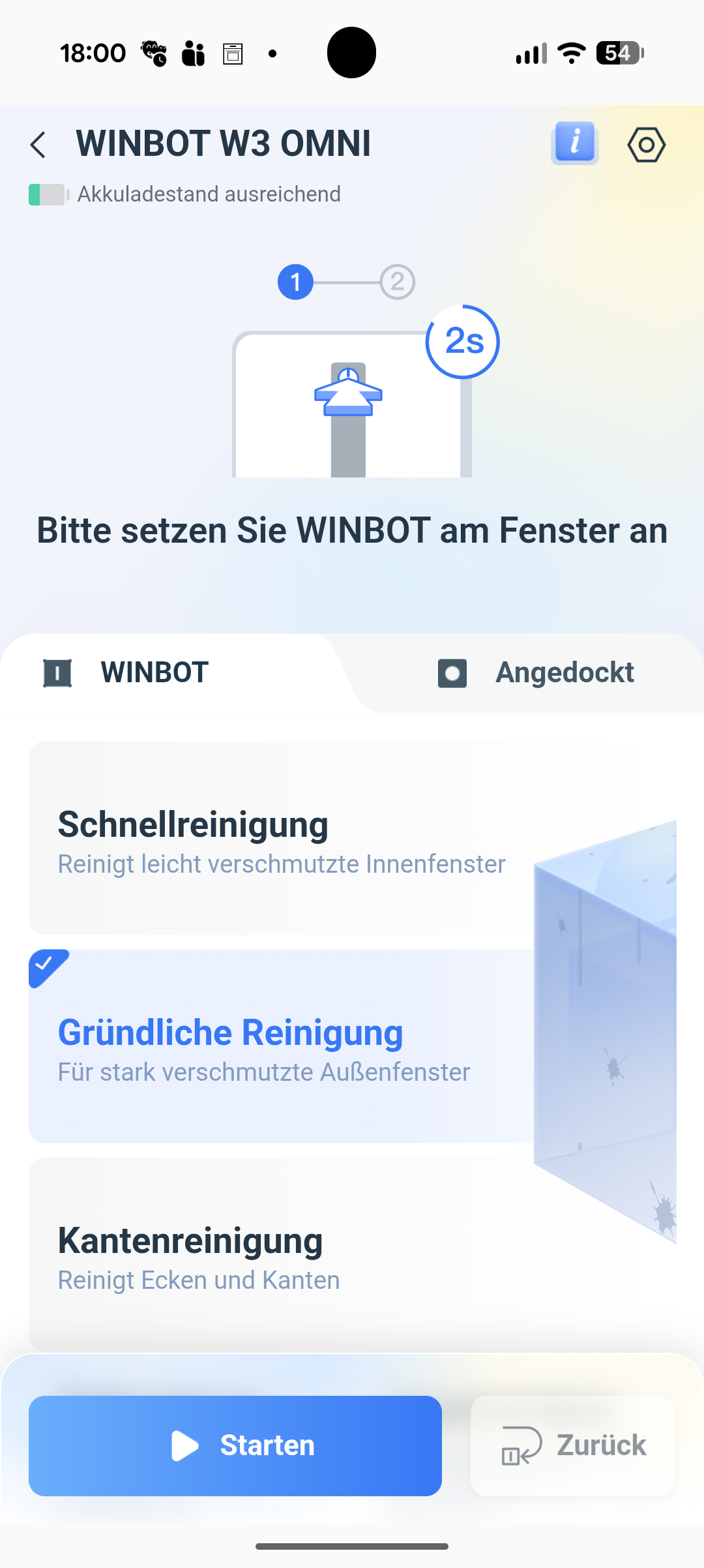
Die App ist für den Betrieb nicht zwingend nötig. Wer sie nutzen will, scannt den QR-Code auf der Unterseite des Geräts und verbindet sich über die Ecovacs-Home-App. Der Roboter kommuniziert dann mit der App über eine Bluetooth-Verbindung, die bei Abruf der Geräteseite aufgebaut wird. Diese ist jedoch nicht so flott, Eingaben kommen teils verzögert an und manchmal schlägt der Ladevorgang im ersten Anlauf auch fehl.
Zudem kann sich der W3 Omni auch per WLAN verbinden, nachdem der Vorgänger nur Bluetooth unterstützt hat. Die Verbindung wollte im Test allerdings nicht auf Anhieb gelingen, der Vorgang schlug bei der Ersteinrichtung fehl. Nach dem Abschluss der Einrichtung war die WLAN-Verbindung aber plötzlich doch aktiv. Dieses Problem sollte sich jedoch noch im Nachgang per Update lösen lassen. Neben den Einstellungen bietet die App auch eine Fernsteuerung: Wer will, kann den Roboter manuell über die Scheibe dirigieren, etwa um gezielt bestimmte Stellen anzufahren.
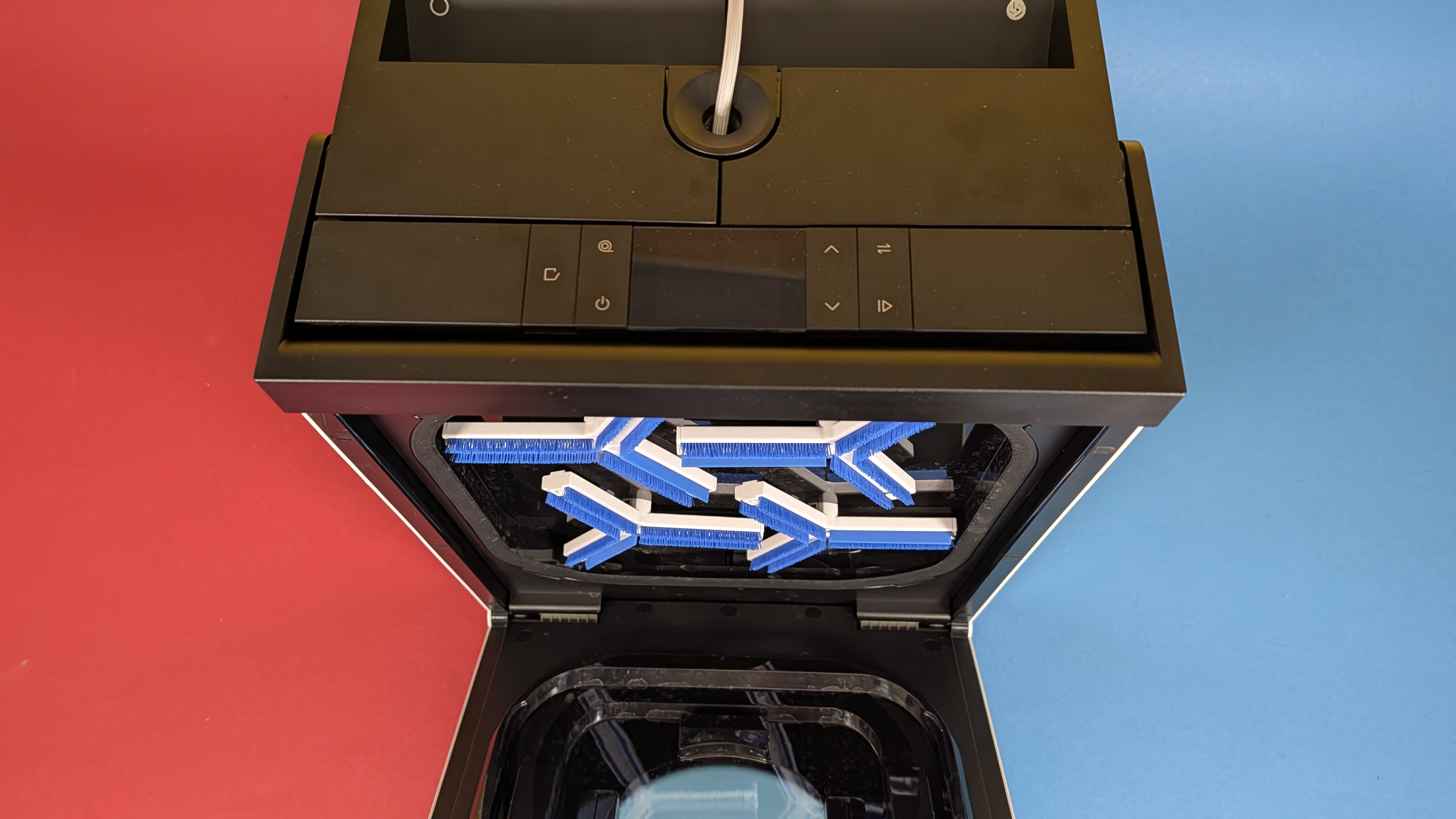
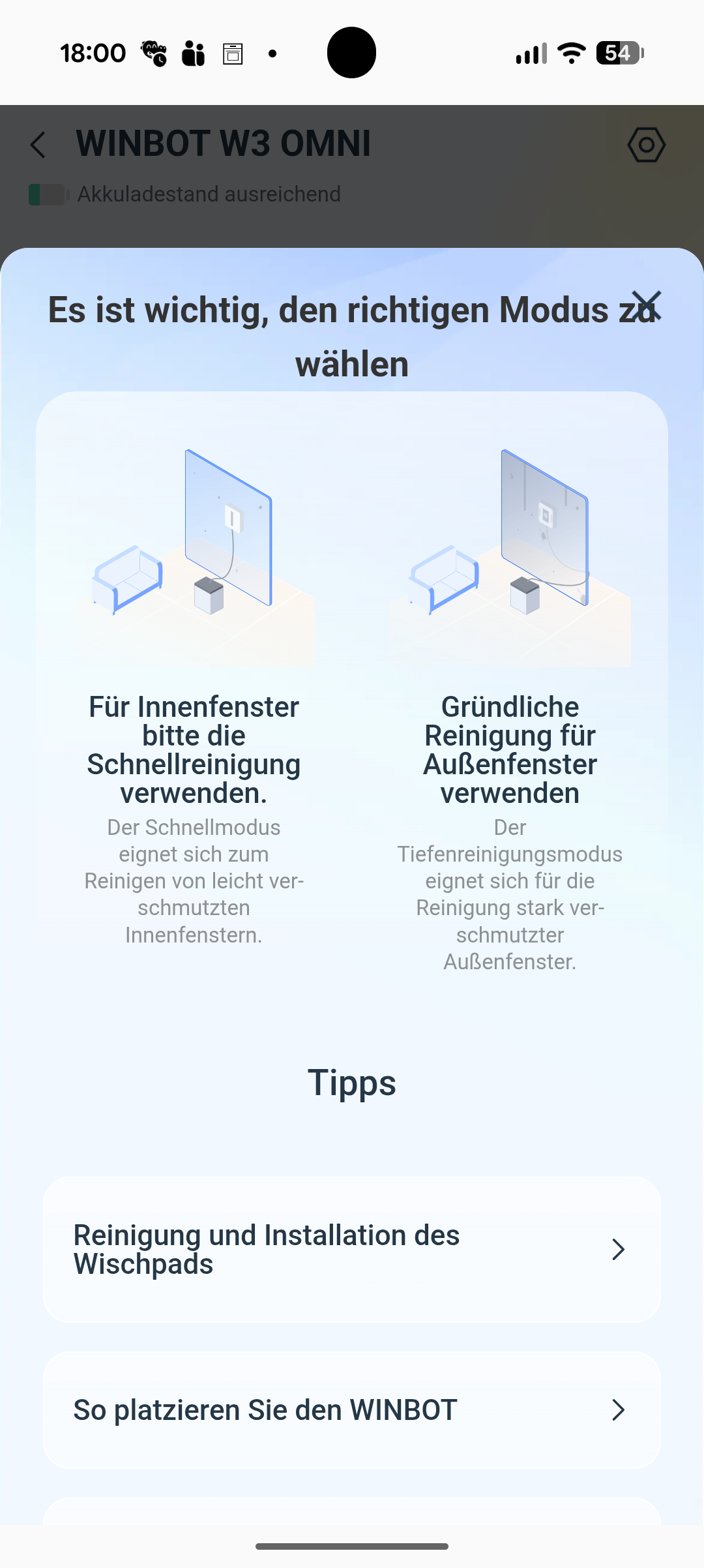
Direkt zum Teststart stand ein Software-Update bereit, dessen Installation über 20 Minuten dauerte. Über die App lassen sich Sprachansagen, Reinigungsintensität und die Anzahl der Bahnen einstellen. Vieles davon geht aber auch direkt über die Station: Sie verfügt erstmals über ein Farbdisplay mit zahlreichen Menüs. Hier lässt sich etwa die intensive Reinigung aktivieren, die Wischtuchwäsche starten oder die verbleibende Akkulaufzeit minutengenau und in Prozent ablesen – ein Fortschritt gegenüber der bisherigen LED-Leuchtanzeige mit fünf Punkten.
Navigation: Wie gut erkennt der Ecovacs Winbot W3 Omni Ecken & Kanten?
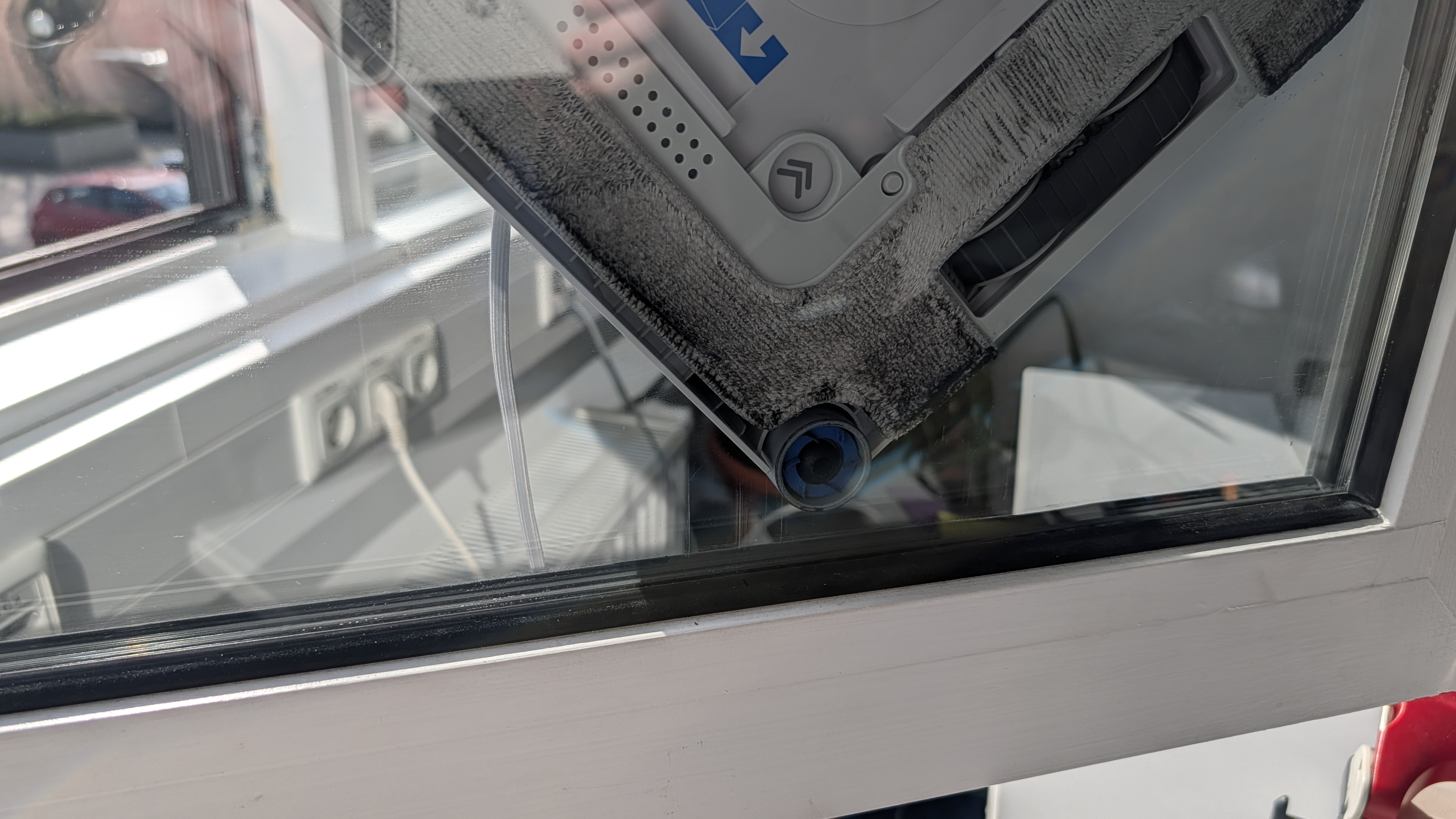
Der Ecovacs Winbot W3 Omni navigiert mit der WIN-SLAM-5.0-Technologie strukturiert und durchdacht über die Fensterscheibe. Er fährt gezielt seine Bahnen ab und lässt keine Stellen aus. Kanten erkennt er über Absturzsensoren zuverlässig, ein separater Sensor registriert auch rahmenlose Glasflächen. Am Ende der Reinigung kehrt der Roboter automatisch exakt zu dem Punkt zurück, an dem er aufgesetzt wurde.
Im Test gab es nur in einer Situation Probleme: Ein außen über dem Fenster angebrachter Rolladen irritierte den Roboter. Er fuhr dagegen und verweigerte den Dienst – wir mussten ihn händisch retten. In allen anderen Situationen funktionierte die Navigation einwandfrei und der Roboter fuhr zuverlässig zum Startpunkt zurück. Wer lieber selbst eingreift, kann den Roboter jederzeit per App-Fernsteuerung manuell über die Scheibe steuern. Die empfohlene Fensterfläche liegt bei bis zu 50 m², die Mindestglasdicke für den Einsatz beträgt 3 mm.
Reinigung: Wie gut wischt der Ecovacs Winbot W3 Omni?
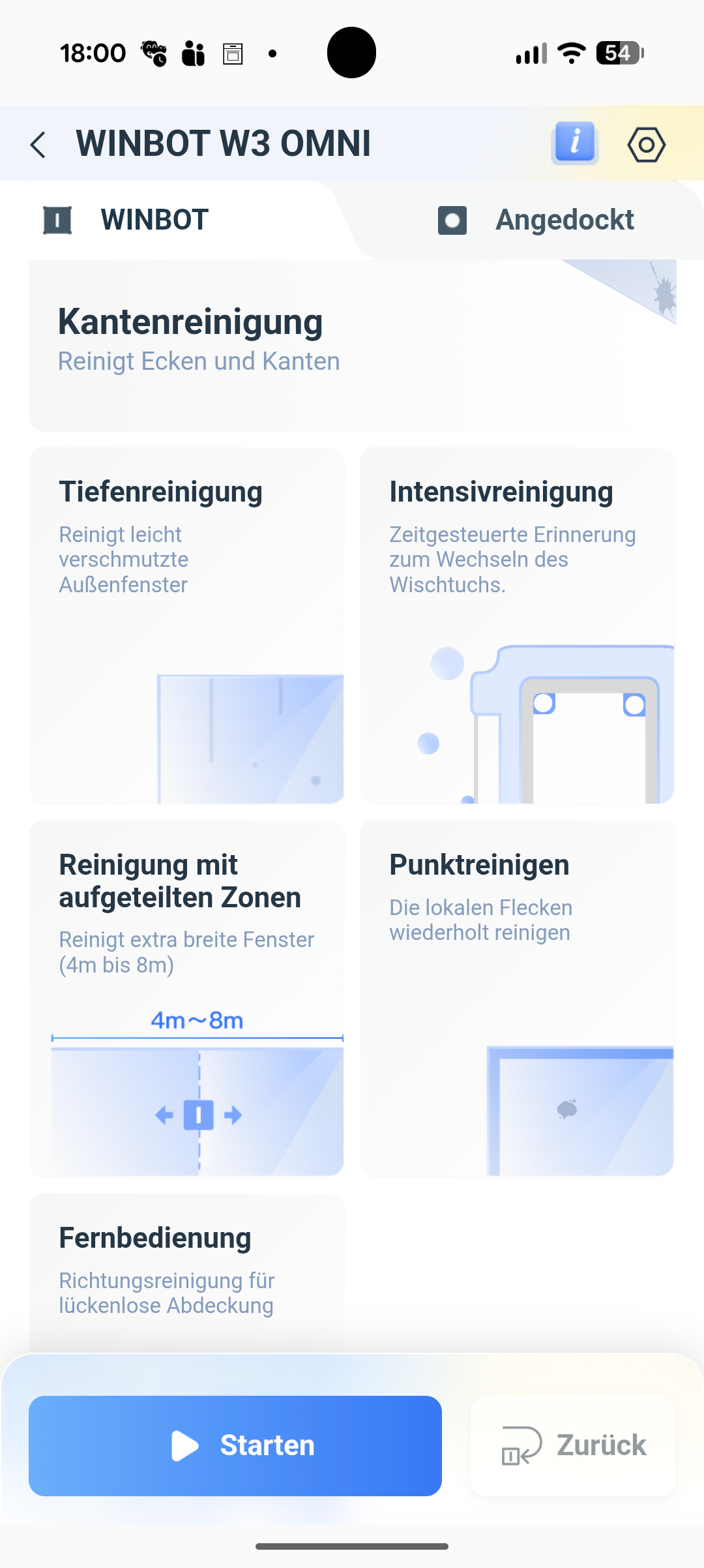
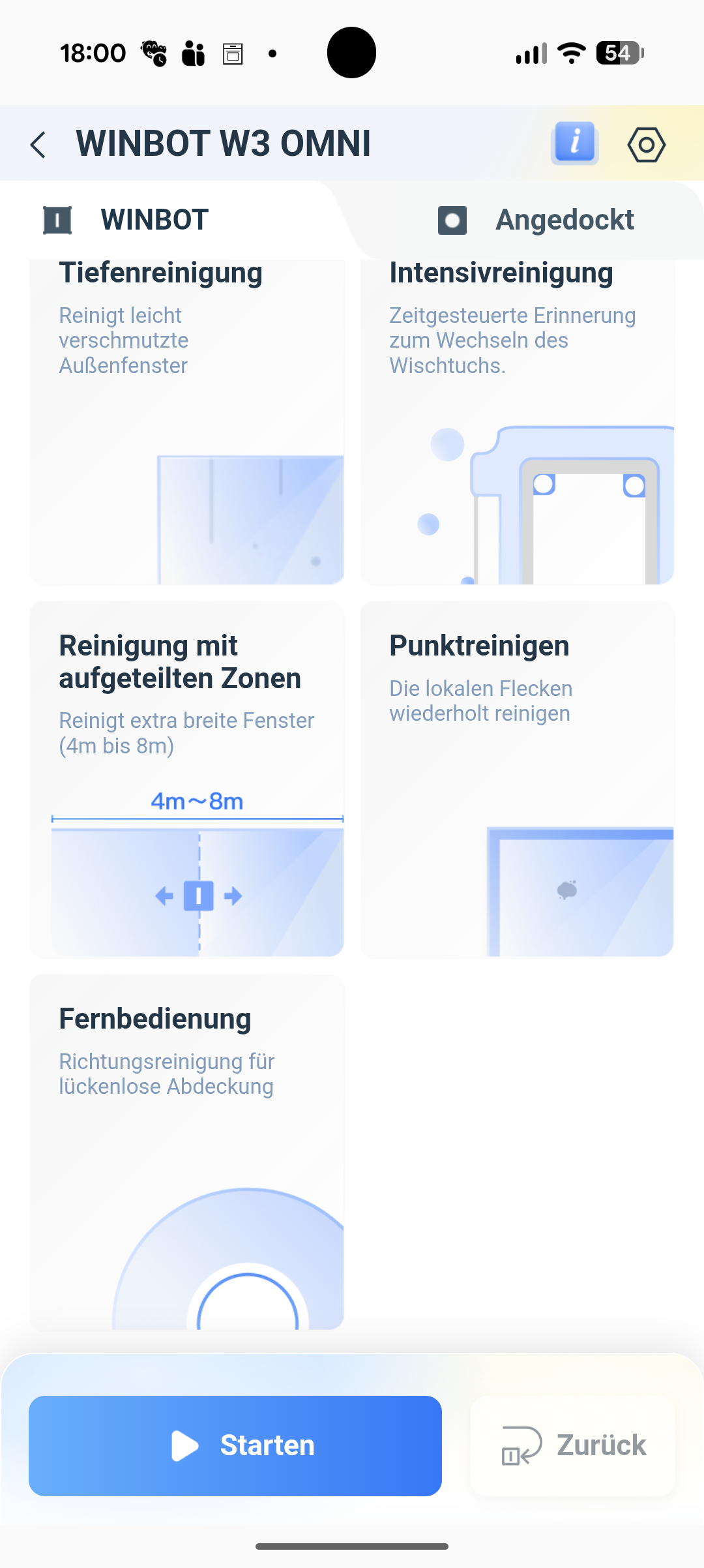
Beim eigentlichen Fensterputzen schlägt sich der Ecovacs Winbot W3 Omni vergleichsweise stark. Er entfernt auch stärkere Verschmutzungen, wobei verkrusteter, fester Schmutz wie Vogelkot manuelle Vorarbeit erfordert, um Verschmieren zu vermeiden. Ganz streifenfrei arbeitet auch der W3 Omni nicht, die Fenster werden aber deutlich sauberer als vor dem Einsatz. Der Roboter verfügt über acht Reinigungsmodi – darunter Schnell-, Tiefen-, Gründlich-, Kanten-, Flecken-, Zonen- und Intensivreinigung. Im Schnellmodus schafft er einen Quadratmeter in gut eineinhalb Minuten (1:35).
Der Roboter sprüht seine Reinigungsflüssigkeit über zwei seitliche Sprühöffnungen als feinen Nebel direkt auf die Scheibe. Die Sprühmenge passt sich automatisch an, lässt sich aber auch manuell per App steuern. Der interne Wassertank fasst 80 ml. Ist er leer, warnt der Roboter. Im Lieferumfang befinden sich zwei Wischpads, ein Wischaufsatz sowie 230 ml Reinigungsmittel.
Ecovacs Winbot W3 Omni – Reinigung
Ecovacs Winbot W3 Omni – Reinigung

Ecovacs Winbot W3 Omni – Reinigung

Ecovacs Winbot W3 Omni – Reinigung

Ecovacs Winbot W3 Omni – Reinigung

Ecovacs Winbot W3 Omni – Reinigung
Ecovacs Winbot W3 Omni – Reinigung

Ecovacs Winbot W3 Omni – Reinigung
Ecovacs Winbot W3 Omni – Reinigung

Ecovacs Winbot W3 Omni – Reinigung

Ecovacs Winbot W3 Omni – Reinigung

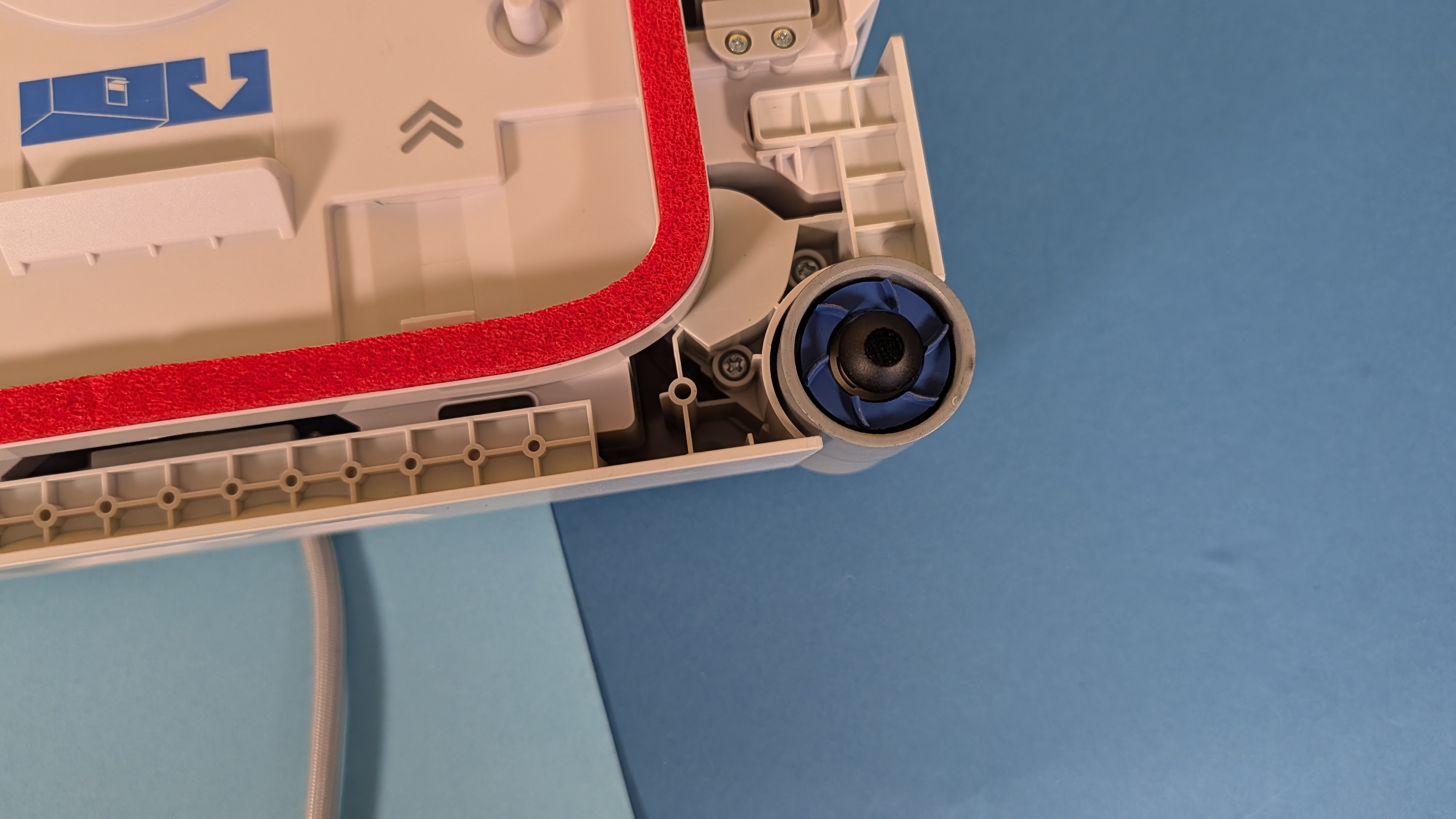
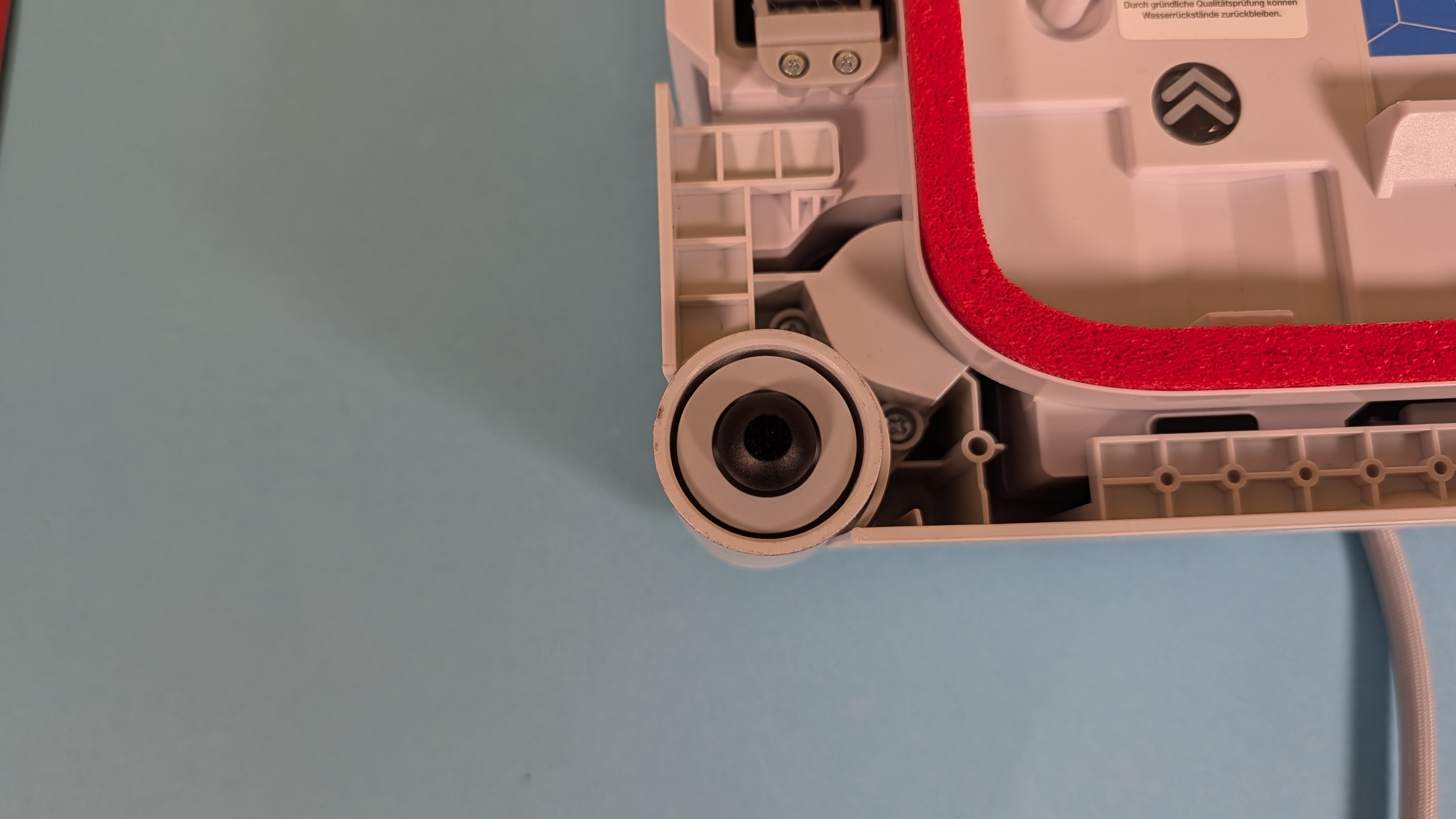
Wie schon beim Vorgänger W2S Omni (Testbericht) gibt es zwei Kantenschrubber als Eckenbürsten. Diese kreisförmigen Kunststoffaufsätze fährt der Roboter aus einer zylindrischen Aufbewahrung aus und setzt sie auf die Scheibe. Er fährt dabei gezielt nah an den Fensterrahmen, um Dreck von den Kanten abzutragen. Das Ergebnis ist besser als ohne Schrubber, aber nicht perfekt – Rückstände bleiben zurück, auch wenn der Roboter einiges abträgt und die Schrubber sichtbar schmutzig werden. Befindet sich die zu reinigende Kante auf der gegenüberliegenden Seite, dreht sich der Roboter auf den Kopf.
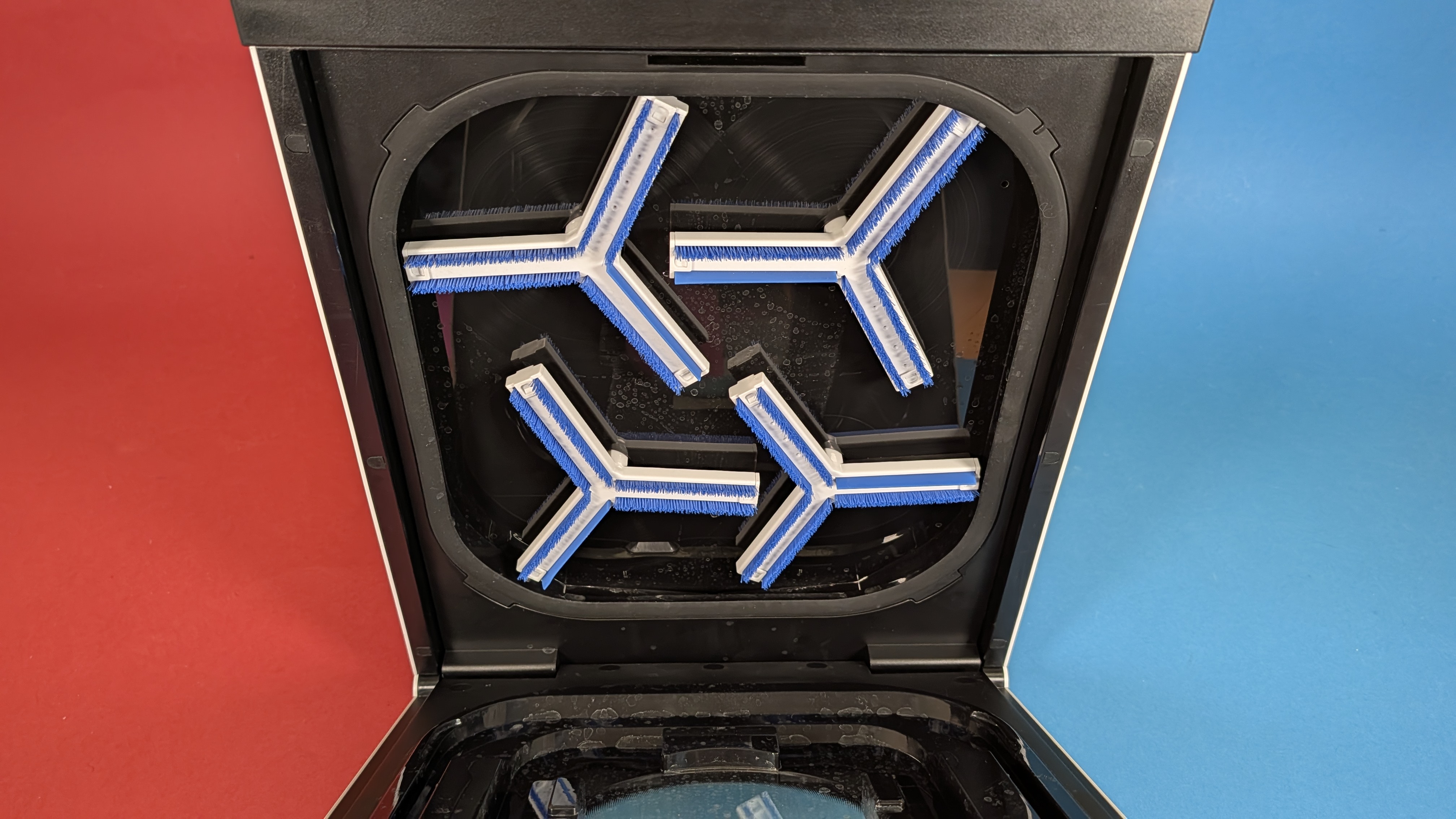
Die integrierte Waschmaschine in der Station ist das eigentliche Highlight. Auf der Vorderseite der Station öffnet sich per Knopfdruck eine Klappe. Das Wischtuch wird mit seinem Kunststoffrahmen auf die Innenseite des Deckels gelegt. Im Gehäuse befinden sich vier dreigliedrige Bürsten, die sich parallel drehen und gegen das Wischtuch schrubben. Frischwasser aus dem oberen Tank benetzt das Tuch, das Schmutzwasser fließt in den separaten Schmutztank.
Die Ergebnisse überzeugen: Selbst intensive Verschmutzungen vom Fensterrahmen bekommt die Wascheinheit in einem Durchgang heraus. Eine Schnellreinigung dauert eine Minute, eine Vollreinigung eineinhalb Minuten. Der Reinigungsvorgang ist durch die rotierenden Bürstenarme in der Station allerdings vergleichsweise laut – sie erreicht laut Hersteller 63 dB(A).
Die Betriebslautstärke des Roboters selbst liegt bei 68 dB(A) – das ist hörbar, aber für einen Fensterputzroboter im üblichen Rahmen.
Akkulaufzeit: Wie lange arbeitet der Ecovacs Winbot W3 Omni?
Der Roboter bezieht seinen Strom über das Verbindungskabel direkt aus der Station und deren Li-Ionen-Akku (21,9 V, 9000 mAh). Pro Akkuladung arbeitet der Roboter rund 130 Minuten. Das ist genug für mehrere große Fenster, und dabei ist man unabhängig von Steckdosen in der Nähe. Vollständig geladen ist der Akku in maximal 3 Stunden, währenddessen kann man – sofern eine Steckdose in der Nähe ist – den Fensterputzroboter auch weiter benutzen.
Die verbleibende Laufzeit lässt sich erstmals minutengenau und in Prozent über das Farbdisplay der Station ablesen. Das ist ein willkommener Fortschritt gegenüber der bisherigen LED-Anzeige mit fünf Punkten.
Preis: Was kostet der Ecovacs Winbot W3 Omni?
Der Ecovacs Winbot W3 Omni startet bei 699 Euro (UVP). Damit liegt er preislich abermals deutlich über dem Vorgänger W2S Omni (Testbericht). Angesichts der integrierten Waschstation und der technologischen Neuerungen ist der Aufpreis nachvollziehbar, für einen Fensterputzroboter aber eine Ansage. Wer auf die überarbeitete Station mit Waschfunktion verzichten kann, fährt mit dem Vorgänger günstiger.
Fazit
Der Ecovacs Winbot W3 Omni ist technologisch der derzeit fortschrittlichste Fensterputzroboter. Die integrierte Waschmaschine für das Wischtuch ist ein echter Komfortgewinn und liefert überzeugende Reinigungsergebnisse. Die Kantenschrubber verbessern die Reinigung an den Rändern, auch wenn sie nicht perfekt arbeiten. Die Navigation arbeitet strukturiert und zuverlässig, die Reinigungsleistung auf der Scheibe ist ordentlich – ganz streifenfrei wird es aber auch hier nicht. Mit 130 Minuten Akkulaufzeit, automatischer Sprühfunktion und manueller Fernsteuerung per App bietet der Roboter viel Komfort.
Die Umsetzung der Station überzeugt allerdings nicht in allen Punkten. Der Haken für den Roboter wirkt wie eine Notlösung, das Gewicht von bis zu 15 kg erschwert den Transport erheblich. Die Verbindung zur App ist über Bluetooth technologiebedingt nicht immer stabil und schnell, WLAN funktionierte im Test nicht von Beginn an problemfrei – das sollte sich allerdings per Softwareupdate lösen lassen. Wer damit leben kann und bereit ist, 699 Euro zu investieren, bekommt das aktuell umfassendste Gesamtpaket am Markt. Ob alle Features des W3 Omni aber für jedermann notwendig sind? Definitiv nicht.

NAND-Modul im Studio Display 2026 und XDR: Apple gibt reichhaltig

Gimp 3.2 erschienen: Das ändert sich für Designer und Pixel-Künstler

Ecovacs Winbot W3 Omni im Test: Fensterputzroboter wäscht sein Wischtuch selbst

Schnelles Boot statt Bus und Bahn: Was sich von London und New York lernen lässt

Community Management und Zielgruppen-Analyse: Die besten Insights aus Blog und Podcast

Community Management zwischen Reichweite und Verantwortung
-
 Künstliche Intelligenzvor 3 Monaten
Künstliche Intelligenzvor 3 MonatenSchnelles Boot statt Bus und Bahn: Was sich von London und New York lernen lässt
-
 Social Mediavor 2 Wochen
Social Mediavor 2 WochenCommunity Management und Zielgruppen-Analyse: Die besten Insights aus Blog und Podcast
-
 Social Mediavor 1 Monat
Social Mediavor 1 MonatCommunity Management zwischen Reichweite und Verantwortung
-
Künstliche Intelligenzvor 4 Wochen
Top 10: Die beste kabellose Überwachungskamera im Test – Akku, WLAN, LTE & Solar
-

 Social Mediavor 3 Monaten
Social Mediavor 3 MonatenDie meistgehörten Gastfolgen 2025 im Feed & Fudder Podcast – Social Media, Recruiting und Karriere-Insights
-

 UX/UI & Webdesignvor 1 Monat
UX/UI & Webdesignvor 1 MonatEindrucksvolle neue Identity für White Ribbon › PAGE online
-

 Künstliche Intelligenzvor 2 Monaten
Künstliche Intelligenzvor 2 MonatenAumovio: neue Displaykonzepte und Zentralrechner mit NXP‑Prozessor
-

 Künstliche Intelligenzvor 3 Monaten
Künstliche Intelligenzvor 3 MonatenÜber 220 m³ Fläche: Neuer Satellit von AST SpaceMobile ist noch größer

